
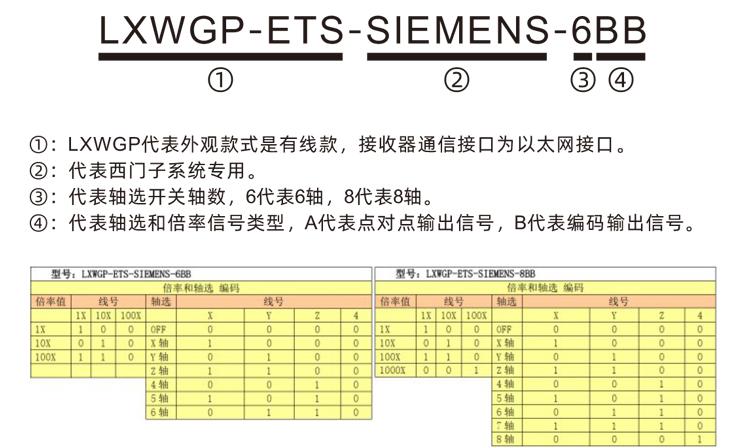
LXWGP-ETS-SIEMENS სადენიანი ელექტრონული ხელის ბორბალი
აღწერილობა


ელექტრონული ხელის ბორბალი გამოიყენება CNC ჩარხების ხელით მართვით、პოზიცია、ხელსაწყოს დაყენება და სხვა ოპერაციები。ელექტრონული ხელის ბორბლის ეს მოდელი არის Siemens-ის სადენიანი ელექტრონული ხელის ბორბალი რეალური დისპლეით.,ხელის ბორბალი დაკავშირებულია Siemens სისტემის X130 ინტერფეისთან ქსელის კაბელის საშუალებით.,წაიკითხეთ სისტემის კოორდინატები და აჩვენეთ ისინი ხელის ბორბლის LCD ეკრანზე S7 პროტოკოლის კომუნიკაციის საშუალებით.,და ხელის ბორბლების მართვის სისტემის ღერძის შერჩევა შესაძლებელია კომუნიკაციის საშუალებით.、გადიდება、ღილაკი და სხვა სიგნალები。

1.დაკავშირებულია 6 ბირთვიანი საავიაციო კაბელის გამოყენებით,ხელის საკაბელო სიგრძე 10 მეტრი。
2.ხელის ბორბლის ეკრანს შეუძლია აჩვენოს სისტემის სამუშაო ნაწილის კოორდინატები、მექანიკური კოორდინატები、კვების სიჩქარე、ღერძის შერჩევა、ინფორმაცია, როგორიცაა გადიდება。
3.გადაუდებელი გაჩერების ღილაკის მხარდაჭერა,IO სიგნალის გამომავალი გადართვა,ხელის ბორბლის გამორთვის გადაუდებელი გაჩერება კვლავ ეფექტურია。
4.მხარს უჭერს 6 მორგებულ ღილაკს,IO სიგნალის გადართვა,შეუძლია სისტემაში სიგნალების გატანა IO გაყვანილობის ან კომუნიკაციის საშუალებით。
5.მხარს უჭერს 6 ან 8 ღერძიან კონტროლს,IO სიგნალის გადართვა,შეუძლია სისტემაში სიგნალების გატანა IO გაყვანილობის ან კომუნიკაციის საშუალებით。
6.გადიდების კონტროლის 3 ან 4 დონის მხარდაჭერა,IO სიგნალის გადართვა,შეუძლია სისტემაში სიგნალების გატანა IO გაყვანილობის ან კომუნიკაციის საშუალებით。
7.პულსის კოდირების მხარდაჭერა,100პულსი/მობრუნება,სიგნალი შეიძლება გამოვიდეს სისტემაში AB პულსური გაყვანილობის მეშვეობით.。
8.Siemens S7 პროტოკოლის მხარდაჭერა,Siemens 828D-ის მხარდაჭერა、840DSL、ONE და სხვა მოდელის სისტემები。

| ხელის ბორბლის მუშა დენის მიწოდების ძაბვა | DC24V/1A |
| მიმღების მიწოდების ძაბვა | DC24V/1A |
| მიმღების IO გამომავალი დატვირთვის დიაპაზონი |
DC24V
|
| ხელის ბორბლის ბოლო კაბელის სიგრძე |
10m
|
| მიმღების ბოლო კაბელის სიგრძე |
1m
|
| მიმღების ბოლო ქსელის კაბელის სიგრძე |
3m
|
| სამუშაო ტემპერატურა |
-25℃<X<55℃
|
| დაცემის საწინააღმდეგო სიმაღლე |
1m
|
| მორგებული ღილაკების რაოდენობა | 6ინდივიდუალური |
| პროდუქტის ზომა | 233*90.7*77.4(მმ) |


კომენტარი:
①გადაუდებელი გაჩერების ღილაკი:
დააჭირეთ გადაუდებელი გაჩერების ღილაკს,გადაუდებელი გაჩერების IO გამომავალი ორი კომპლექტი მიმღებზე გათიშულია,და ხელის ბორბლის ყველა ფუნქცია არასწორია。
გადაუდებელი გაჩერების გათავისუფლების შემდეგ,გადაუდებელი გაჩერების IO გამომავალი მიმღებზე დახურულია,ხელის ბორბლის ყველა ფუნქცია აღდგენილია。
②ეკრანის ჩვენება:
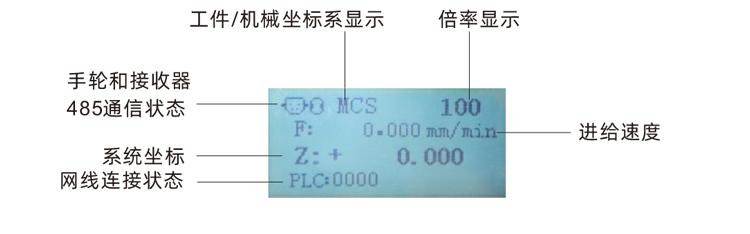
PLC:0000ეს ნიშნავს, რომ ქსელის კაბელი არ არის დაკავშირებული,PLC:1010ეს ნიშნავს, რომ ქსელის კაბელი და PLC სისტემა წარმატებით არის დაკავშირებული.,
PLC:1110მიუთითებს, რომ ხელის ბორბალი წარმატებით წერს სისტემის მონაცემებს.,PLC:0001მიუთითებს კომპიუტერთან წარმატებულ კავშირზე。
③ მორგებული ღილაკი:
6მორგებული ღილაკები,თითოეული ღილაკი შეესაბამება IO გამომავალ წერტილს მიმღებზე,ასევე დაკავშირებულია სისტემასთან კომუნიკაციის საშუალებით。
④ღერძის შერჩევის გადამრთველი:
ღერძის შერჩევის გადამრთველის გადართვამ შეიძლება ხელის ბორბლით კონტროლირებადი მოძრავი ღერძი შეცვალოს.。
⑤ ჩართვის ღილაკი:
ხანგრძლივად დააჭირეთ ჩართვის ღილაკს ორივე მხარეს,ის ეფექტურია მხოლოდ პულსის ენკოდერის შერყევით。 და ჩართულია მიმღებზე ჩართული IO გამომავალი 2 კომპლექტი,გაათავისუფლეთ ჩართვის ღილაკი,ჩართეთ IO გამომავალი გათიშვა。
⑥გამადიდებელი გადამრთველი:
გამადიდებელი გადამრთველის გადართვამ შეიძლება ხელის ბორბლით კონტროლირებადი გადიდება.。
⑦ პულსის შიფრატორი:
ხანგრძლივად დააჭირეთ ჩართვის ღილაკს,შეანჯღრიეთ პულსის ენკოდერი,გაგზავნეთ პულსის სიგნალი,მანქანის ღერძის მოძრაობის კონტროლი。
⑧ხელის ბორბლის კაბელი:
ხელის ბორბლისა და მიმღების დამაკავშირებელი კაბელი,საავიაციო დანამატი,ხელის ბორბლის ელექტრომომარაგებისა და კომუნიკაციისთვის。



6.1პროდუქტის ინსტალაციის ეტაპები
1.დააინსტალირეთ მიმღები ელექტრო კაბინეტში ოთხ კუთხეში ხრახნიანი ხვრელების მეშვეობით.。
2.იხილეთ ჩვენი მიმღების გაყვანილობის დიაგრამა,შეამოწმეთ თქვენი საველე აღჭურვილობის წინააღმდეგ,შეაერთეთ მოწყობილობა კაბელისა და მიმღების საშუალებით
დაკავშირება,გამოიყენეთ ქსელის კაბელი მიმღების სისტემის X130 ინტერფეისთან დასაკავშირებლად。
3.მიმღების დაფიქსირების შემდეგ,დააინსტალირეთ საავიაციო დანამატის ბაზა პანელზე ხელის ბორბლის ღიობაში,კიდევ ერთი ბაზა
ტერმინალის ზოლი ჩართულია მიმღების ხელის ბორბლის ინტერფეისში.。შემდეგ ჩადეთ ბორბლის ბოლო კაბელის საავიაციო შტეფსელი ბაზაში,გამკაცრდეს
მოწყობილობები。
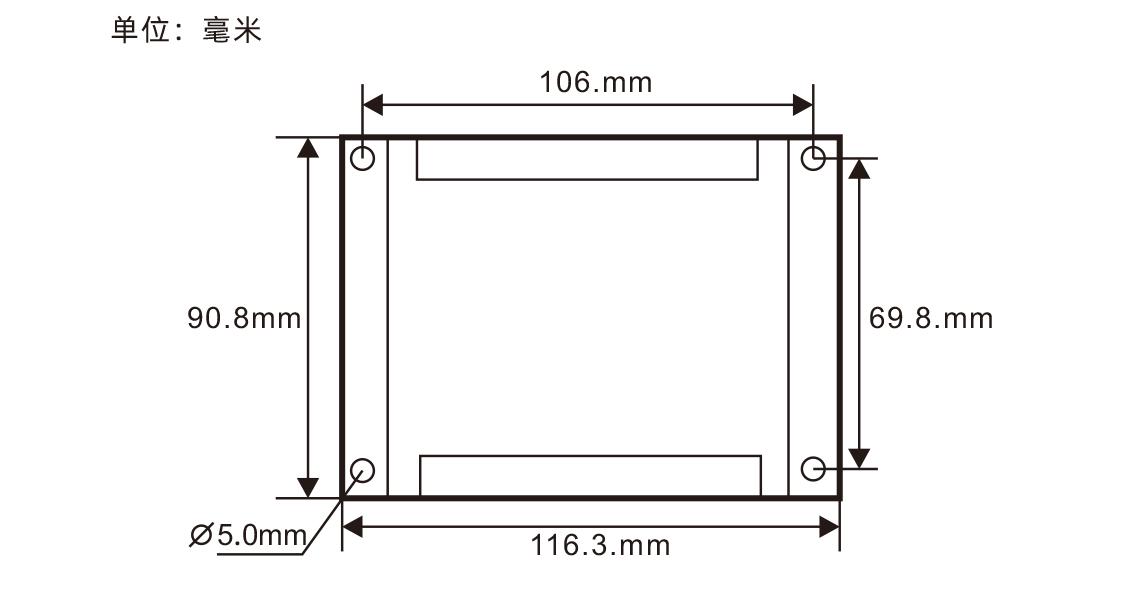
6.2მიმღების დაყენების ზომები
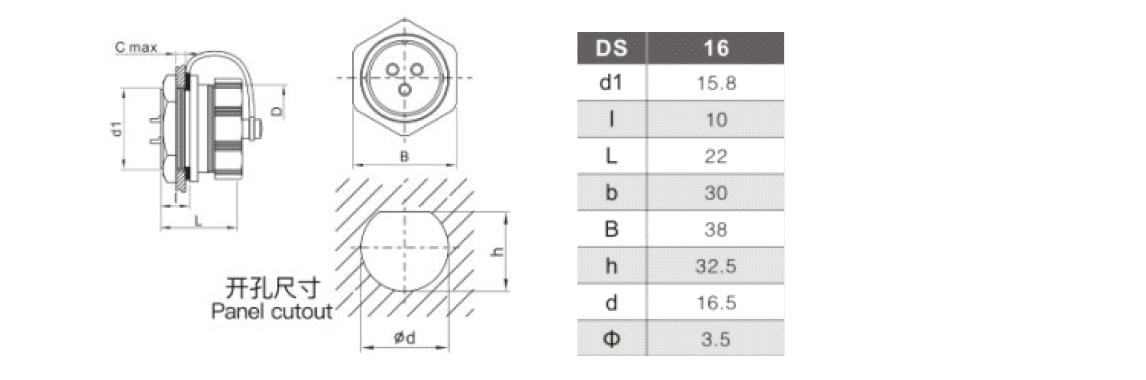
6.3საავიაციო დანამატის დაყენების ზომები
6.4მიმღების გაყვანილობის საცნობარო დიაგრამა

6.2მიმღების დაყენების ზომები
6.3საავიაციო დანამატის დაყენების ზომები
6.4მიმღების გაყვანილობის საცნობარო დიაგრამა

1.მიმღები ჩართულია,მიმღების სამუშაო ინდიკატორის შუქი ანათებს,შეაერთეთ მიმღები კომპიუტერთან ქსელის კაბელის გამოყენებით,დააყენეთ ფიქსირებული IP მისამართი თქვენი კომპიუტერისთვის,გამოიყენეთ ქსელის კონფიგურაციის ხელსაწყოს პროგრამული უზრუნველყოფა ხელის ბორბლის ფუნქციისთვის ქსელის პარამეტრების დასაყენებლად,კონკრეტული პარამეტრები
მეთოდისთვის იხილეთ „LXWGP-ETS სადენიანი ხელის ბორბლის გამოყენების ინსტრუქცია“。
2.მიმღების დაყენების დასრულების შემდეგ,სისტემა მოითხოვს PLC პროგრამის დაპროგრამებას,დეტალებისთვის იხილეთ „LXWGP-ETS დაყენების მეთოდები სხვადასხვა Siemens CNC სისტემებისთვის“ და PLC პროგრამის რუტინული ინფორმაცია。
3.ზემოაღნიშნული პარამეტრების დასრულების შემდეგ,მიიყვანეთ მიმღები აპარატის ელექტრო კაბინეტში და დააინსტალირეთ,გამორთეთ ქსელის კაბელი კომპიუტერიდან და შეაერთეთ იგი სისტემის X130 ინტერფეისში,შეაერთეთ მიმღების დენის და პულსის სადენები。
4.მანქანა ჩართულია,მიმღები ჩართულია,მიმღების სამუშაო ინდიკატორის შუქი ანათებს,ჩართეთ ხელის ბორბლის დენის ჩამრთველი,ხელბორბლიანი ეკრანის ჩატვირთვა,ეკრანის ჩვენება PLC:1010,მიუთითებს წარმატებულ კომუნიკაციას ხელისა და სისტემას შორის.。
5.აირჩიეთ ღერძის შერჩევა:ღერძის შერჩევის გადამრთველი,აირჩიეთ ღერძი, რომლის მუშაობაც გსურთ。
6.აირჩიეთ გადიდება:გამადიდებელი გადამრთველი,აირჩიეთ თქვენთვის საჭირო გამადიდებელი ფაილი。
7.მოძრავი ღერძი:ხანგრძლივად დააჭირეთ ჩართვის ღილაკს,აირჩიეთ ღერძის ამომრჩეველი გადამრთველი,აირჩიეთ გამადიდებელი გადამრთველი,შემდეგ ჩართეთ პულსის ენკოდერი,გადაატრიალეთ ღერძი საათის ისრის მიმართულებით ღერძის წინ გადასაადგილებლად,უარყოფითი მოძრავი ღერძის როტაცია საათის ისრის საწინააღმდეგო მიმართულებით。
8.ხანგრძლივად დააჭირეთ ნებისმიერ მორგებულ ღილაკს,ჩართულია მიმღების შესაბამისი ღილაკის IO გამომავალი,გამოშვების ღილაკის გამომავალი გამორთვა。
9.დააჭირეთ გადაუდებელი გაჩერების ღილაკს,მიმღები წყვეტს გადაუდებელი გაჩერების IO გამომავალს,ხელის ბორბლის ფუნქციის დარღვევა,გაათავისუფლეთ გადაუდებელი გაჩერების ღილაკი,გადაუდებელი გაჩერების IO გამომავალი დახურულია,ხელის ბორბლის ფუნქცია აღდგენილია。


| წარუმატებლობის მდგომარეობა | შესაძლო მიზეზები |
პრობლემების მოგვარება
|
|
|
პრობლემების მოგვარება
|
1.სწორად და საიმედოდ არის თუ არა დაკავშირებული საავიაციო კაბელი ხელის ბორბალსა და მიმღებს შორის
2.მიმღების დენის ძაბვა საკმარისია?
3.ხელის ბორბლის უკმარისობა
|
1.შეამოწმეთ საავიაციო კაბელის კავშირი ხელის ბორბალსა და მიმღებს შორის
2.შეამოწმეთ მიმღების შეყვანის სიმძლავრე
3.დაუკავშირდით მწარმოებელს და დაბრუნდით ქარხანაში მოვლისთვის
|
|
| არანაირი რეაგირება ხელის ბორბლის მუშაობისას |
1.დაკავშირებულია თუ არა ქსელის კაბელები მიმღებსა და სისტემას შორის?
2.სისტემის PLC პროგრამა კარგად არის დაწერილი?
3.მიმღების კონფიგურაცია სწორად არის დაყენებული?
4.ხელის ბორბლის ეკრანზე გამოსახული 485 კომუნიკაციის ხატულა ვერ მოხერხდა?
5.ხელის ბორბლის მუშაობისას,თქვენ უნდა დააჭიროთ და გეჭიროთ ჩართვის ღილაკები ორივე მხრიდან
6.გადაუდებელი გაჩერების ღილაკი გამოშვებულია?
|
1.შეამოწმეთ მიმღები და სისტემის X130 ქსელის პორტი დაკავშირებულია თუ არა ქსელის კაბელთან
2.შეამოწმეთ და დაადასტურეთ, არის თუ არა სისტემის PLC დაწერილი ჩვენ მიერ მოწოდებული საცნობარო მასალების მიხედვით.
3.შეამოწმეთ, ეხება თუ არა მიმღები ჩვენს ინფორმაციას და მოწოდებულ ხელსაწყოს პროგრამულ უზრუნველყოფას,სწორად დააყენეთ ქსელის პარამეტრები და მიმღების DB მისამართი და ა.შ.
4.შეამოწმეთ ხელის საჭესა და მიმღებს შორის
6ძირითადი მწვანე ბუდე,ორი საკომუნიკაციო ხაზი:485-A და 485-B,სწორად და უსაფრთხოდ არის დაკავშირებული?,არის რაიმე ჩართვა?
|
|
|
მიმღების ჩართვის შემდეგ,მიმღებზე სამუშაო ნათურა არ ანათებს
|
1.ელექტრომომარაგების დარღვევა
2.დენის გაყვანილობის შეცდომა
3.მიმღების უკმარისობა
|
1.შეამოწმეთ, აქვს თუ არა ელექტრომომარაგებას ძაბვა,
აკმაყოფილებს თუ არა ძაბვა მოთხოვნებს?
2.შეამოწმეთ, არის თუ არა დაკავშირებული ელექტრომომარაგების დადებითი და უარყოფითი პოლუსები საპირისპიროდ
3.დაბრუნდით ქარხანაში სარემონტოდ
|

1.გთხოვთ შეინახოთ იგი ნორმალურ ტემპერატურასა და წნევაზე,გამოიყენეთ მშრალ გარემოში,გაახანგრძლივეთ მომსახურების ვადა。
2.გთხოვთ, მოერიდეთ წვიმის ზემოქმედებას、გამოიყენეთ პათოლოგიურ გარემოში, როგორიცაა ბუშტუკები,გაახანგრძლივეთ მომსახურების ვადა。
3.გთხოვთ შეინარჩუნოთ ხელის ბორბლის გარეგნობა სუფთა,გაახანგრძლივეთ მომსახურების ვადა。
4.გთხოვთ, მოერიდეთ შეკუმშვას、შემოდგომა、დაჯექი და დაელოდე,თავიდან აიცილოთ ხელის ბორბლის შიგნით არსებული ზუსტი ნაწილების დაზიანება ან სიზუსტის შეცდომები。
5.დიდი ხანია არ გამოიყენება,გთხოვთ შეინახოთ ხელის ბორბალი სუფთა და უსაფრთხო ადგილას。
6.შენახვისა და ტრანსპორტირებისას ყურადღება მიაქციეთ ტენიანობისა და შოკგამძლეობას。

1.გთხოვთ, ყურადღებით წაიკითხოთ ინსტრუქციები გამოყენებამდე,არაპროფესიონალების მიერ ოპერაცია აკრძალულია。
2.მას შემდეგ, რაც რაიმე არანორმალური სიტუაცია ხდება ხელის საჭეზე,გთხოვთ, დაუყოვნებლივ შეწყვიტოთ მისი გამოყენება,და პრობლემების მოგვარება,პრობლემების მოგვარებამდე,აკრძალულია გაუმართავი ხელის ბორბლის ხელახლა გამოყენება,მოერიდეთ უსაფრთხოების ავარიებს ხელის ბორბლების უცნობი გაუმართაობის გამო;
3.საჭიროებს შეკეთებას,გთხოვთ, დაუკავშირდეთ მწარმოებელს,თუ დაზიანება გამოწვეულია თვითრემონტით,მწარმოებელი არ იძლევა გარანტიას。


-500x650.png)

.png)
