

ການຄວບຄຸມອຸດສາຫະກໍາໄລຍະຫ່າງໄກສອກຫຼີກຊັ້ນ
ຕິດຕາມລົດເຊືອກທີ່ມີການຕັດການຄວບຄຸມໄລຍະໄກ DH22S-LD-485
ລາຍລະອຽດ

1.ການແນະນໍາຜະລິດຕະພັນ
ສາຍ crawler saw ຕັດອັດຕະໂນມັດການຄວບຄຸມໄລຍະໄກແມ່ນເຫມາະສົມສໍາລັບ crawler wire saw ເຄື່ອງຕັດ,ອະນຸສັນຍາ 485Modbus RTU ຖືກນໍາໃຊ້ເພື່ອຄວບຄຸມການຄວບຄຸມຄວາມໄວຂອງຕົວກວາດເວັບຂອງຕົວກວາດເວັບຊ້າຍແລະຂວາແລະທາງຫນ້າ, ຫລັງ, ຊ້າຍແລະຂວາ.,ແລະຂະຫນາດໃຫຍ່ motor converter ຄວາມຖີ່ຄວາມໄວລະບຽບການເລີ່ມຕົ້ນ。ແລະປະຈຸບັນການເຮັດວຽກຂອງ inverter motor ຂະຫນາດໃຫຍ່ສາມາດອ່ານໄດ້ໂດຍຜ່ານ 485-Modbus RTU protocol,ການວິເຄາະແລະການປຽບທຽບກະແສມໍເຕີຂະຫນາດໃຫຍ່,ປັບຄວາມໄວຕິດຕາມຊ້າຍ ແລະຂວາໂດຍອັດຕະໂນມັດໃນເວລາຈິງ,ຮັບຮູ້ຟັງຊັນການຕັດອັດຕະໂນມັດ。
2.ຄຸນສົມບັດຂອງຜະລິດຕະພັນ
1.ຮັບຮອງເອົາເຕັກໂນໂລຢີການສື່ສານໄຮ້ສາຍ 43MHZ,ໄລຍະການໃຊ້ງານໄຮ້ສາຍ 100 ແມັດ。
2.ຮັບຮອງເອົາຟັງຊັນຄວາມຖີ່ຂອງອັດຕະໂນມັດ,ໃຊ້ 32 ຂະຫນາດຂອງການຄວບຄຸມໄລຍະໄກທີ່ບໍ່ມີສາຍໃນເວລາດຽວກັນ,ບໍ່ມີຜົນກະທົບຕໍ່ກັນແລະກັນ。
3.ຮອງຮັບທຸກຕົວປ່ຽນຄວາມຖີ່ດ້ວຍ 485 modbus RTU protocol,ຍີ່ຫໍ້ inverter ປັບຕົວໃນປັດຈຸບັນປະກອບມີ:Shanghai Xielin、ຟູຈິ、ຮຸຍຊວນ、Zhongchen、INVT、Yasukawa Tatsu。ຖ້າຍີ່ຫໍ້ບໍ່ຖືກດັດແປງ, ກະລຸນາຕິດຕໍ່ພວກເຮົາສໍາລັບການປັບແຕ່ງ.。
4.ສະຫນັບສະຫນູນລະບຽບການຄວາມໄວແປງຄວາມຖີ່ motor ຂະຫນາດໃຫຍ່、ເລີ່ມຂຶ້ນ、ການອ່ານປະຈຸບັນ。
5.ຮອງຮັບການປັບຄວາມໄວຂອງຕົວກວາດເວັບຕົວກວາດເວັບຊ້າຍແລະຂວາ、ເລີ່ມຂຶ້ນ、ການຄວບຄຸມດ້ານຫນ້າແລະຫລັງຊ້າຍແລະຂວາ。
6.ສະຫນັບສະຫນູນການແກ້ໄຂເສັ້ນ inverter ຕົວກວາດເວັບຊ້າຍແລະຂວາ,ຮັກສາເຄື່ອງເຄື່ອນທີ່ໃນເສັ້ນຊື່。
7.ສາຍສະຫນັບສະຫນູນໄດ້ເຫັນການທໍາງານຂອງການຕັດອັດຕະໂນມັດ,ອີງຕາມຂໍ້ມູນ motor ຂະຫນາດໃຫຍ່ໃນປະຈຸບັນ,ປັບຄວາມໄວຕິດຕາມຊ້າຍ ແລະຂວາໂດຍອັດຕະໂນມັດໃນເວລາຈິງ。
8.ມັນຍັງເຂົ້າກັນໄດ້ກັບຜົນຜະລິດ IO ໂດຍກົງເພື່ອຄວບຄຸມການເລີ່ມຕົ້ນແລະຢຸດ motor.,ຜົນຜະລິດແຮງດັນອະນາລັອກຄວບຄຸມຄວາມໄວຂອງມໍເຕີ。
3.ຂໍ້ມູນສະເພາະຂອງຜະລິດຕະພັນ
| ແຮງດັນໄຟຟ້າສະຖານີແລະກະແສໄຟຟ້າ | 2ແບດເຕີຣີ້ມາດຕະຖານ AA - 3V / 10mA |
| ເຄື່ອງຮັບແຮງດັນ ແລະກະແສໄຟຟ້າ | 24V/1A |
| ພະລັງງານສົ່ງຕໍ່ດ້ວຍມື | 15DBM |
| ຜູ້ຮັບໄດ້ຮັບຄວາມອ່ອນໄຫວ | -100DBM |
| ຄວາມຖີ່ຂອງການສື່ສານໄຮ້ສາຍ | 433ແຖບ Mhz |
| ອຸນຫະພູມໃນການເຮັດວຽກ | -25℃<ສະຖາວັນ<55℃ |
| ຄວາມສູງຕ້ານການຫຼຸດລົງ | ປະຕິບັດຕາມມາດຕະຖານການທົດສອບແຫ່ງຊາດ |
| ລະດັບກັນນ້ໍາ | IP67 |
| ຂະຫນາດຜະລິດຕະພັນ | 225*84*58(ມມ) |
4.ການແນະນໍາການທໍາງານຂອງຜະລິດຕະພັນ
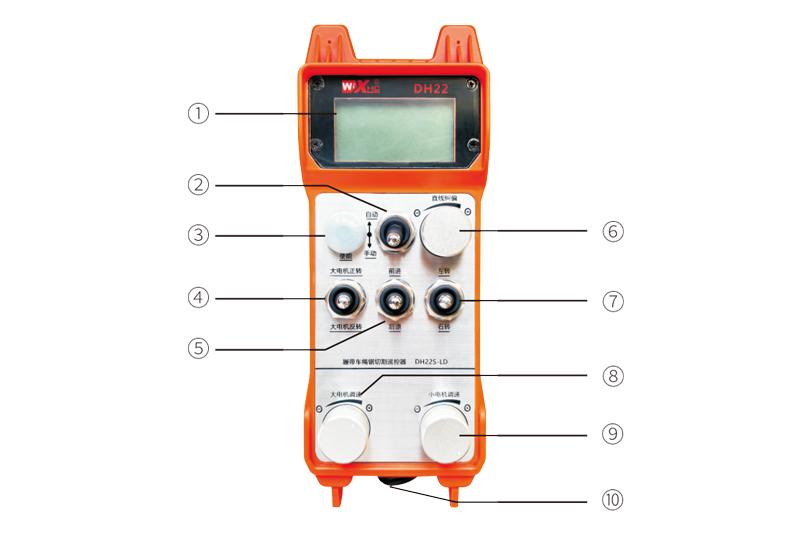
ຄໍາເຫັນ:
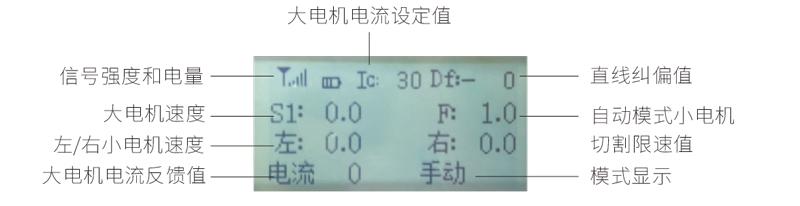
①ຈໍສະແດງຜົນ:
②ສະຫຼັບໂໝດ:
ນຳໃຊ້ສະວິດ 2 ຄວາມໄວ,ສາມາດປ່ຽນລະຫວ່າງໂຫມດອັດຕະໂນມັດແລະຄູ່ມື,ຈະມີສະຫຼັບການສະແດງຮູບແບບທີ່ສອດຄ້ອງກັນກ່ຽວກັບການສະແດງ.。
③ເປີດໃຊ້:
ປຸ່ມປະສົມ,ການດໍາເນີນງານບາງອັນຮຽກຮ້ອງໃຫ້ມີການກົດຄ້າງໄວ້ເພື່ອເປີດໃຊ້ງານ,ເບິ່ງລາຍລະອຽດຂອງແຕ່ລະສະວິດສໍາລັບລາຍລະອຽດ.。
④ ສະຫຼັບມໍເຕີຂະຫນາດໃຫຍ່:
ນຳໃຊ້ສະວິດຣີເຊັດ 3 ຄວາມໄວ,ພິກສະຫຼັບນີ້,ສາມາດຄວບຄຸມການຫມຸນຕໍ່ແລະປີ້ນກັບເຄື່ອງຈັກຂະຫນາດໃຫຍ່,ສະຖານະພາບຈະຍັງຄົງຢູ່ຫຼັງຈາກປ່ອຍໃຫ້ໄປ,ຈະມີການສະແດງຜົນທີ່ສອດຄ້ອງກັນຢູ່ໃນຈໍສະແດງຜົນ,S1↑ ລູກສອນຊີ້ບອກການຫມຸນໄປຂ້າງຫນ້າ,ລູກສອນ S1↓ ສະແດງເຖິງການປີ້ນກັບ。
⑤ ສະຫຼັບໄປໜ້າ/ປີ້ນມໍເຕີຂະໜາດນ້ອຍ:
ນຳໃຊ້ສະວິດລັອກຕົນເອງ 3 ຄວາມໄວ,ກົດປຸ່ມເປີດໃຊ້ງານ + flip ສະຫຼັບ,ສາມາດຄວບຄຸມມໍເຕີຂະຫນາດນ້ອຍເພື່ອກ້າວໄປຂ້າງຫນ້າແລະຖອຍຫລັງ,ຈະມີການສະແດງຜົນທີ່ສອດຄ້ອງກັນຢູ່ໃນຈໍສະແດງຜົນ,↑↑ ລູກສອນຊີ້ໄປຂ້າງໜ້າ,↓↓ ລູກສອນຊີ້ບອກການກັບຄືນ。
⑥ ການແກ້ໄຂການບິດເບືອນເສັ້ນຊື່:
ການນໍາໃຊ້ລູກບິດການເຂົ້າລະຫັດຫຼາຍຫັນ,ກົດປຸ່ມເປີດໃຊ້ງານ,ລ້ຽວຂວາ,ການສະແດງການແກ້ໄຂເສັ້ນຊື່:Df:ຊ້າຍ,ແຕ່ລະຄັ້ງຂອງລູກບິດເພີ່ມຂຶ້ນ 1 ຫນ່ວຍ.,ຄວາມໄວມໍເຕີຊ້າຍເພີ່ມຂຶ້ນ 0.1 ຫນ່ວຍ;ຫັນປຸ່ມຊ້າຍ,ການສະແດງການແກ້ໄຂເສັ້ນຊື່:Df:ຖືກຕ້ອງ,ແຕ່ລະຄັ້ງຂອງລູກບິດເພີ່ມຂຶ້ນ 1 ຫນ່ວຍ.,ຄວາມໄວມໍເຕີທີ່ຖືກຕ້ອງເພີ່ມຂຶ້ນ 0.1 ຫນ່ວຍ。
⑦ສະວິດຫັນ motor ຂະຫນາດນ້ອຍ:
ນຳໃຊ້ສະວິດຣີເຊັດ 3 ຄວາມໄວ,ປ່ຽນສະວິດນີ້ຢູ່ໃນໂໝດຄູ່ມື,ສາມາດຄວບຄຸມມໍເຕີຂະຫນາດນ້ອຍເພື່ອຫັນຊ້າຍແລະຂວາ,ການຄວບຄຸມໄລຍະໄກຈະຢຸດການດໍາເນີນການນີ້ອັດຕະໂນມັດຫຼັງຈາກປ່ອຍໃຫ້ໄປ.。ໃນສະຖານະການຕໍ່ຫນ້າ,ພິກສະຫຼັບນີ້,ຈະມີການສະແດງຜົນທີ່ສອດຄ້ອງກັນຢູ່ໃນຈໍສະແດງຜົນ,←↑ ລູກສອນຊີ້ບອກລ້ຽວຊ້າຍ,↑ → ລູກສອນຊີ້ບອກການລ້ຽວຂວາ。ໃນສະຖານະການ retreat,ພິກສະຫຼັບນີ້,ຈະມີການສະແດງຜົນທີ່ສອດຄ້ອງກັນຢູ່ໃນຈໍສະແດງຜົນ,←↓ ລູກສອນຊີ້ບອກລ້ຽວຊ້າຍ,↓ → ລູກສອນຊີ້ບອກການລ້ຽວຂວາ。
⑧ລະບຽບຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່:
ການນໍາໃຊ້ລູກບິດການເຂົ້າລະຫັດຫຼາຍຫັນ,ໝຸນ 1 ເຟຣມແຕ່ລະເທື່ອ,ຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່ມີການປ່ຽນແປງປະມານ 0.2 ຫນ່ວຍ,ການຫມຸນວຽນຢ່າງໄວວາສາມາດດັດແປງມູນຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່。
⑨ກົດລະບຽບຄວາມໄວມໍເຕີຂະຫນາດນ້ອຍ:
ການນໍາໃຊ້ລູກບິດການເຂົ້າລະຫັດຫຼາຍຫັນ,ໃນຮູບແບບຄູ່ມື,ກົດປຸ່ມເປີດໃຊ້ງານ,ຈາກນັ້ນ ໝຸນ 1 ເຟຣມແຕ່ລະເທື່ອ,ຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍຊ້າຍແລະຂວາປ່ຽນແປງປະມານ 0.1 ຫນ່ວຍ,ການຫມຸນໄວສາມາດດັດແປງມູນຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍໄດ້ໄວ。ໃນຮູບແບບອັດຕະໂນມັດ,ກົດປຸ່ມເປີດໃຊ້ງານ,ຈາກນັ້ນ ໝຸນ 1 ເຟຣມແຕ່ລະເທື່ອ,ຄ່າຈໍາກັດຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ F ປ່ຽນແປງປະມານ 0.1 ຫນ່ວຍ,ພືດຫມູນວຽນໄວສາມາດດັດແປງມູນຄ່າຈໍາກັດຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍໄດ້ໄວ。
⑩ສະວິດໄຟຄວບຄຸມໄລຍະໄກ:
ເປີດເຄື່ອງສະແດງຜົນການຄວບຄຸມໄລຍະໄກ。
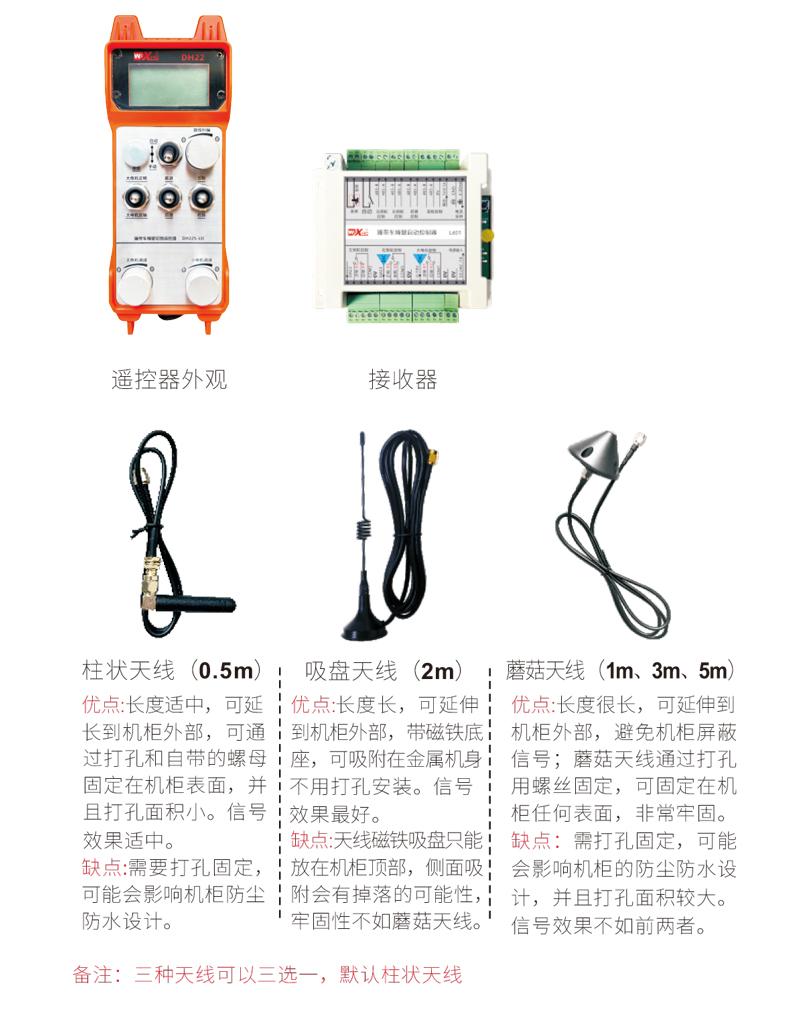
5.ແຜນວາດອຸປະກອນເສີມຜະລິດຕະພັນ
6.ຄູ່ມືການຕິດຕັ້ງຜະລິດຕະພັນ
6.1ຂັ້ນຕອນການຕິດຕັ້ງຜະລິດຕະພັນ
6.1ຂັ້ນຕອນການຕິດຕັ້ງຜະລິດຕະພັນ
1.ຕິດຕັ້ງຜູ້ຮັບໃນຕູ້ເອກະພາບໂດຍຜ່ານການ snap-on ຢູ່ດ້ານຫຼັງ,ຫຼືຕິດຕັ້ງມັນຢູ່ໃນຕູ້ໄຟຟ້າໂດຍຜ່ານຮູສະກູຢູ່ສີ່ແຈຂອງຜູ້ຮັບ.。
2.ອ້າງເຖິງແຜນວາດສາຍໄຟຂອງພວກເຮົາ,ປຽບທຽບອຸປະກອນໃນສະຖານທີ່ຂອງທ່ານ,ເຊື່ອມຕໍ່ອຸປະກອນກັບເຄື່ອງຮັບຜ່ານສາຍ。
3.ຫຼັງຈາກຜູ້ຮັບໄດ້ຖືກແກ້ໄຂແລ້ວ,ເສົາອາກາດທີ່ມີໃຫ້ກັບຜູ້ຮັບຕ້ອງໄດ້ເຊື່ອມຕໍ່,ແລະຕິດຕັ້ງຊັ້ນນອກຂອງເສົາອາກາດຫລືວາງມັນຢູ່ນອກຕູ້ໄຟຟ້າ,ມັນໄດ້ຖືກແນະນໍາໃຫ້ວາງສັນຍານຢູ່ດ້ານເທິງຂອງຕູ້ໄຟຟ້າ.,ມັນບໍ່ໄດ້ຖືກອະນຸຍາດໃຫ້ຕັດສາຍອາກາດ,ຫຼືຈະ
ເສົາອາກາດຖືກວາງໄວ້ພາຍໃນຕູ້ໄຟຟ້າ,ມັນອາດຈະເຮັດໃຫ້ສັນຍານສາມາດໃຊ້ງານໄດ້。
4.ສຸດທ້າຍ, ຕິດຕັ້ງຫມໍ້ໄຟໃນການຄວບຄຸມໄລຍະໄກ,ບີບຝາແບັດໃຫ້ແໜ້ນ,ຈາກນັ້ນເປີດສະວິດໄຟຄວບຄຸມໄລຍະໄກ,ຈໍສະແດງຜົນການຄວບຄຸມໄລຍະໄກຈະສະແດງການໂຕ້ຕອບການເຮັດວຽກປົກກະຕິ.,ທ່ານສາມາດປະຕິບັດການຄວບຄຸມໄລຍະໄກ。
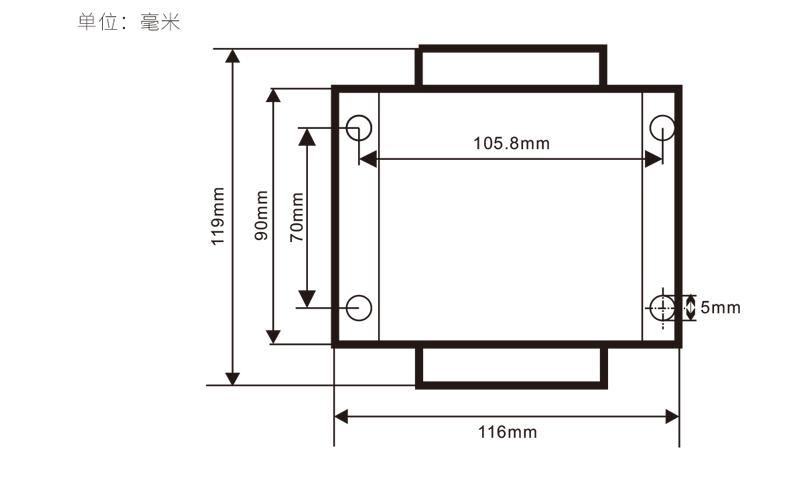
6.2ຂະຫນາດຕິດຕັ້ງຮັບ
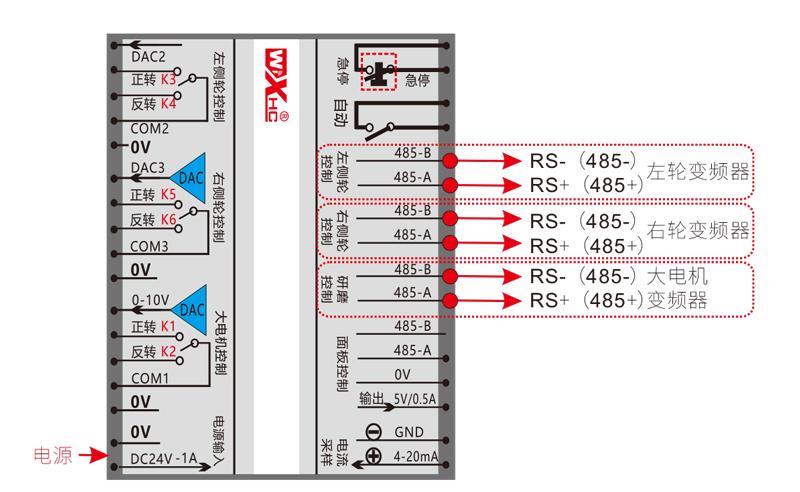
6.3ແຜນວາດສາຍໄຟສາຍ
7.ຄໍາແນະນໍາການດໍາເນີນງານຂອງຜະລິດຕະພັນ
7.1ການຕັ້ງຄ່າພາລາມິເຕີການຄວບຄຸມໄລຍະໄກ
ໃສ່ວິທີການພາລາມິເຕີພື້ນຫຼັງການຄວບຄຸມໄລຍະໄກ:ຍ້າຍສະຫຼັບຮູບແບບໄປເປັນຮູບແບບຄູ່ມື,ຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍຖືກປັບເປັນ 25 ທາງດ້ານຊ້າຍແລະຂວາ,ຫຼືທັງສອງແມ່ນ 0、10、20、40、50,ດຶງສະວິດການຫມຸນໄປຂ້າງຫນ້າຂອງມໍເຕີຂະຫນາດໃຫຍ່ຂຶ້ນເທິງ 3 ເທື່ອຕິດຕໍ່ກັນ,ດຶງລົງ 3 ເທື່ອຕິດຕໍ່ກັນ;
ໃຊ້ປຸ່ມ "ການປັບຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ" ເພື່ອຫັນຫນ້າ,ຫຼັງຈາກການກົດເປີດໃຊ້ງານ, ເຮັດໃຫ້ປຸ່ມຄວບຄຸມຄວາມໄວມໍເຕີຂະຫນາດນ້ອຍເພື່ອປັບປຸງແກ້ໄຂຕົວກໍານົດການ.;
ຫຼັງຈາກການດັດແກ້,ຫັນຫນ້າໄປຫາທ້າຍ,ເລືອກ Save ແລະ Exit,ກົດປຸ່ມເປີດໃຊ້ງານເພື່ອອອກຈາກເມນູ;
ຕົວກໍານົດການແມ່ນດັ່ງຕໍ່ໄປນີ້:
ປັດຈຸບັນສູງສຸດ:ຊ່ວງຄ່າຕິຊົມປັດຈຸບັນຂອງມໍເຕີຂະຫນາດໃຫຍ່,ຊ່ວງການຕັ້ງຄ່າ 15-200A,ຄ່າເລີ່ມຕົ້ນ 100;
ຕົວກໍານົດການຄວບຄຸມຄວາມໄວ:ຮູບແບບອັດຕະໂນມັດ motor ຂະຫນາດນ້ອຍອັດຕະໂນມັດເລັ່ງຄວາມໄວ,ຂະຫນາດນ້ອຍກວ່າ, ໄວກວ່າ,ຂອບເຂດການຕັ້ງຄ່າ 200-1500,ຄ່າເລີ່ມຕົ້ນ 800;
ຕົວກໍານົດການຊັກຊ້າ:ກໍານົດຂອບເຂດຈໍາກັດເທິງສໍາລັບການປ່ຽນແປງຄວາມໄວມໍເຕີທີ່ອະນຸຍາດໃຫ້,ເມື່ອການປ່ຽນແປງໃນປະຈຸບັນເກີນຄ່ານີ້,ຈະຊ້າລົງ。
ຂະຫນາດນ້ອຍກວ່າ,ມໍເຕີຊ້າຍແລະຂວາຊ້າລົງໄວ,ຊ່ວງ 05-12,ຄ່າເລີ່ມຕົ້ນ 06;
ຄວາມເລັ່ງ a1:ມໍເຕີຂະຫນາດໃຫຍ່, ຄວາມໄວເພີ່ມຂຶ້ນໄວ.,ຊ່ວງ 00-06,ຄ່າເລີ່ມຕົ້ນ 01;
ການຊ້າລົງ a2:ຄວາມໄວຂອງມໍເຕີໃຫຍ່ກວ່າ, ມັນຈະຫຼຸດລົງໄວ.,ຊ່ວງ 00-06,ຄ່າເລີ່ມຕົ້ນ 02;
ເປີດໃຊ້ການປັບຄວາມໄວ:ມັນຈໍາເປັນຕ້ອງກົດ Enable ເພື່ອປັບຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍບໍ?,00ປິດໃຊ້ງານ,01ເປີດໃຊ້,ຄ່າເລີ່ມຕົ້ນ 01;
ເລີ່ມການລັອກດ້ວຍຕົນເອງ:ມໍເຕີຂະຫນາດໃຫຍ່ຈະຮັກສາການລັອກດ້ວຍຕົນເອງໂດຍອັດຕະໂນມັດຫຼັງຈາກເປີດແລະເປີດສະຫຼັບປີ້ນ?,00ບໍ່ຮັກສາ,01ຮັກສາ,ຄ່າເລີ່ມຕົ້ນ 01;
ຍ່າງສູງສຸດ:ຄວາມໄວສູງສຸດຂອງມໍເຕີຊ້າຍແລະຂວາ,ຊ່ວງ 10-100,ຄ່າເລີ່ມຕົ້ນ 50;
ຕັດກະແສໄຟຟ້າ:ກະແສຕັດສູງສຸດ,ຫນ້າຈໍສະແດງຄ່າ IC,ຊ່ວງ 15-160,ຄ່າເລີ່ມຕົ້ນ 30,ຈໍສະແດງຜົນ IC ທີ່ສອດຄ້ອງກັນ:30。ຂອບເຂດຈໍາກັດເທິງຂອງພາລາມິເຕີນີ້ = ສູງສຸດໃນປະຈຸບັນ x80%;
ຂີດຈຳກັດຄວາມໄວເລີ່ມຕົ້ນ:ຄວາມໄວຕັດອັດຕະໂນມັດຂອງມໍເຕີຂະຫນາດນ້ອຍໃນຕອນເລີ່ມຕົ້ນ,ຊ່ວງ 00-100,ຄ່າເລີ່ມຕົ້ນ 10,ໜ້າຈໍສະແດງຜົນ F1.0,ພາລາມິເຕີນີ້ແມ່ນຖືກຕ້ອງພຽງແຕ່ເມື່ອການຍ່າງສູງສຸດຖືກຕັ້ງເປັນ 50。
ໂໝດອັດຕະໂນມັດ:ຕັ້ງເປັນ 00,ສະວິດອັດຕະໂນມັດ/ຄູ່ມືແມ່ນສະຫຼັບໂໝດ,ຕັ້ງເປັນ 01,ຫັນປ່ຽນອັດຕະໂນມັດ / ຄູ່ມືໄປຫາຕໍາແຫນ່ງອັດຕະໂນມັດ,ຈໍສະແດງຜົນເຮັດໃຫ້ມີແສງ,ການປິດເຄື່ອງຮັບສັນຍານອັດຕະໂນມັດໃນເຄື່ອງຮັບ,ຕີຄູ່ມື,ຕັດການເຊື່ອມຕໍ່ຢູ່ປາຍຍອດອອກອັດຕະໂນມັດ;
ຈຳກັດຄວາມໄວຊົດເຊີຍ:ເຄື່ອງຈັກຂະຫນາດນ້ອຍອັດຕະໂນມັດຄວາມໄວຕັດເທິງຂອບເຂດຈໍາກັດ,ຊ່ວງ 00-200,ຄ່າເລີ່ມຕົ້ນ 60,ຫນ້າຈໍກົງກັບການສະແດງ 6.0;ສະແດງຄ່າເທິງ limit = speed limit offset × 0.1;
ເຈົ້າພາບສູງສຸດ:ຄວາມໄວສູງສຸດຂອງມໍເຕີຂະຫນາດໃຫຍ່,ຊ່ວງ 10-100,ຄ່າເລີ່ມຕົ້ນ 50;
ອຸປະກອນ mbus (ຕ້ອງການ):ການຄັດເລືອກຕົວແບບ inverter motor ຂະຫນາດໃຫຍ່,ຊ່ວງ 00-03,ຄ່າເລີ່ມຕົ້ນ 03;
00-Shanghai Xielin 01-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
ອຸປະກອນ sbus (ຕ້ອງການ):ການຄັດເລືອກຕົວແບບ inverter motor ຂະຫນາດນ້ອຍ,ຊ່ວງ 00-05,ຄ່າເລີ່ມຕົ້ນ 03;
00-Shanghai Xielin 01-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
04-Yaskawa Da 05-ບໍ່ມີ
7.2ການຕັ້ງຄ່າຕົວກໍານົດການແປງຄວາມຖີ່
1.ການເລືອກແຫຼ່ງຄໍາສັ່ງ:ຊ່ອງທາງຄໍາສັ່ງການສື່ສານ
2.ການເລືອກແຫຼ່ງຄວາມຖີ່ຫຼັກ:ການສື່ສານໃຫ້
3.ອັດຕາ baud:19200
4.ຮູບແບບຂໍ້ມູນ:ບໍ່ມີ checksum,ຮູບແບບຂໍ້ມູນ<8-N-1>
5.ທີ່ຢູ່ທ້ອງຖິ່ນ:ຕົວປ່ຽນຄວາມຖີ່ຊ້າຍແມ່ນຕັ້ງເປັນ 1,ຕົວປ່ຽນຄວາມຖີ່ທີ່ຖືກຕ້ອງແມ່ນຕັ້ງເປັນ 2,inverter ມໍເຕີຂະຫນາດໃຫຍ່ຖືກຕັ້ງເປັນ 3
7.3ຄໍາແນະນໍາການດໍາເນີນງານການຄວບຄຸມໄລຍະໄກ
1.ເຄື່ອງໄດ້ຖືກຂັບເຄື່ອນ,ເປີດເຄື່ອງຄວບຄຸມໄລຍະໄກ,ໃສ່ພື້ນຫຼັງການຄວບຄຸມໄລຍະໄກ,ກໍານົດພາລາມິເຕີພື້ນຫລັງຂອງການຄວບຄຸມໄລຍະໄກ,ຫຼັກ
ມັນແມ່ນການກໍານົດແບບ inverter ຂອງມໍເຕີຂະຫນາດນ້ອຍແລະມໍເຕີຂະຫນາດໃຫຍ່ (ຂ້າມຂັ້ນຕອນນີ້ຖ້າຜູ້ຜະລິດເຄື່ອງຈັກໄດ້ຕັ້ງມັນ);
2.ກໍານົດຕົວກໍານົດການ inverter (ຂ້າມຂັ້ນຕອນນີ້ຖ້າຫາກວ່າຜູ້ຜະລິດເຄື່ອງຈັກໄດ້ກໍານົດໃຫ້ເຂົາເຈົ້າ);
3.ສະຫຼັບການຄວບຄຸມໄລຍະໄກເປັນໂໝດຄູ່ມື,ຫຼັງຈາກນັ້ນ, ໃຊ້ການຄວບຄຸມຫ່າງໄກສອກຫຼີກເພື່ອຍ້າຍເຄື່ອງໄປຕໍາແຫນ່ງເຮັດວຽກ;
4.ໃນຮູບແບບຄູ່ມື,ຕັ້ງຄ່າ IC ຄ່າການຕັ້ງຄ່າປະຈຸບັນຕັດມໍເຕີຂະຫນາດໃຫຍ່,ກໍານົດຄວາມໄວມໍເຕີສູງສຸດ;
5.ສະຫຼັບໄປໂໝດອັດຕະໂນມັດ,ກໍານົດຂອບເຂດຄວາມໄວການຕັດມໍເຕີຂະຫນາດນ້ອຍຄ່າ F;
6.ໃນຮູບແບບອັດຕະໂນມັດ,ຫັນສະວິດມໍເຕີໃຫຍ່ເພື່ອສົ່ງຕໍ່ເພື່ອເລີ່ມຕົ້ນມໍເຕີໃຫຍ່,ຫຼັງຈາກນັ້ນ, ເຮັດໃຫ້ສະຫຼັບມໍເຕີຂະຫນາດນ້ອຍ
ເກຍໄປໜ້າ ຫຼື ປີ້ນ,ການຄວບຄຸມໄລຍະໄກເຂົ້າສູ່ຮູບແບບການຕັດອັດຕະໂນມັດ,ເລີ່ມຕັດ。
8.ການແກ້ໄຂບັນຫາຜະລິດຕະພັນ
| ສະຖານະການຜິດ | ສາເຫດທີ່ເປັນໄປໄດ້ |
ວິທີການແກ້ໄຂບັນຫາ
|
|
ກົດປຸ່ມເປີດປິດ,
ບໍ່ສາມາດເປີດ ແລະ ປິດໄດ້,
ຈໍສະແດງຜົນບໍ່ສະຫວ່າງ
|
1.ບໍ່ມີຫມໍ້ໄຟຕິດຕັ້ງຢູ່ໃນການຄວບຄຸມໄລຍະໄກ
ຫຼືແບດເຕີຣີຖືກຕິດຕັ້ງຢູ່ໃນທິດທາງທີ່ບໍ່ຖືກຕ້ອງ
2.ພະລັງງານແບັດເຕີຣີທີ່ບໍ່ແນ່ນອນ
3.ການຄວບຄຸມໄລຍະໄກລົ້ມເຫຼວ
|
1.检查遥控器电池安装情况
2.ແບດເຕີຣີທົດແທນ
3.ຕິດຕໍ່ຜູ້ຜະລິດເພື່ອກັບໄປໂຮງງານສໍາລັບການບໍາລຸງຮັກສາ
|
|
ເປີດເຄື່ອງຄວບຄຸມໄລຍະໄກ,
显示掉网急停!
请重新操作!
|
1.ຜູ້ຮັບບໍ່ໄດ້ໃຊ້ໄຟຟ້າ
2.etsenna ຮັບບໍ່ໄດ້ຕິດຕັ້ງ
3.ໄລຍະຫ່າງລະຫວ່າງການຄວບຄຸມໄລຍະໄກແລະເຄື່ອງແມ່ນໄກເກີນໄປ
4.ການແຊກແຊງສິ່ງແວດລ້ອມ
5.遥控器开机前,必须接收器先通电,遥控器再开机
|
1.ກວດເບິ່ງອໍານາດຂອງຜູ້ຮັບ
2.ຕິດຕັ້ງເສົາອາກາດຂອງຜູ້ຮັບ,ຕິດຕັ້ງຊັ້ນນອກຂອງເສົາອາກາດຢູ່ນອກຕູ້ໄຟຟ້າເພື່ອແກ້ໄຂມັນ
3.ການປະຕິບັດງານໃນໄລຍະທາງປົກກະຕິ
4.①ເພີ່ມປະສິດທິພາບສາຍໄຟຂອງຕູ້ກະແສໄຟຟ້າ,接收器天线走线尽量远离220V及以上线路②接收器电源尽量使用独立开关电源供电,并且电源线增加电源隔离模块和磁环,ເພີ່ມຄວາມສາມາດຕ້ານການແຊກແຊງ
|
|
ເປີດເຄື່ອງຄວບຄຸມໄລຍະໄກ,显示chage battery
|
1.ພະລັງງານແບັດເຕີຣີທີ່ບໍ່ແນ່ນອນ
2.ການຕິດຕັ້ງແບດເຕີລີ່ຫຼືການຕິດຕໍ່ທີ່ບໍ່ດີ
|
1.ແບດເຕີຣີທົດແທນ
2.ກວດສອບການຕິດຕັ້ງແບັດເຕີຣີ,ແລະບໍ່ວ່າຈະເປັນແຜ່ນໂລຫະຢູ່ທັງສອງສົ້ນຂອງຊ່ອງໃສ່ຫມໍ້ໄຟແມ່ນສະອາດແລະບໍ່ມີສິ່ງຕ່າງປະເທດ,ສະອາດ
|
|
ບາງປຸ່ມຢູ່ໃນການຄວບຄຸມໄລຍະໄກ
ຫຼືສະຫຼັບບໍ່ຕອບສະຫນອງ
|
1.ປ່ຽນຄວາມລົ້ມເຫຼວຂອງຄວາມເສຍຫາຍ
2.ຄວາມເສຍຫາຍຄວາມເສຍຫາຍຂອງຜູ້ຮັບ
|
1.ສັງເກດເມື່ອປີ້ນສະວິດ,ມີລູກສອນທີ່ສອດຄ້ອງກັນຢູ່ໃນຫນ້າຈໍສະແດງຜົນບໍ?;ມີລູກສອນສະແດງ,ສະແດງໃຫ້ເຫັນວ່າສະວິດແມ່ນປົກກະຕິ;ບໍ່ມີລູກສອນສະແດງຫມາຍຄວາມວ່າສະວິດແມ່ນແຕກ.,ກັບໄປທີ່ການບໍາລຸງຮັກສາໂຮງງານ
2.ກັບໄປທີ່ການບໍາລຸງຮັກສາໂຮງງານ
|
|
ຫຼັງຈາກທີ່ຜູ້ຮັບແມ່ນໃຊ້ຢູ່,ບໍ່ມີໄຟໃນຜູ້ຮັບ
|
1.ຄວາມຜິດປົກກະຕິຂອງພະລັງງານ
2.ຄວາມຜິດພາດສາຍໄຟພະລັງງານ
3.ຄວາມລົ້ມເຫຼວຂອງເຄື່ອງຮັບ
|
1.ກວດເບິ່ງວ່າການສະຫນອງພະລັງງານມີແຮງດັນໄຟຟ້າ,ແຮງດັນໄຟຟ້າຕອບສະຫນອງຄວາມຮຽກຮ້ອງຕ້ອງການ
2.ກວດເບິ່ງວ່າ Poles ໃນແງ່ບວກແລະລົບຂອງການສະຫນອງພະລັງງານແມ່ນເຊື່ອມຕໍ່ໃນດ້ານຫຼັງ
3.ກັບໄປທີ່ການບໍາລຸງຮັກສາໂຮງງານ
|
9.ບໍາລຸງຮັກສາແລະການດູແລ
1.ກະລຸນາຢູ່ທີ່ອຸນຫະພູມຫ້ອງແລະຄວາມກົດດັນ,ໃຊ້ໃນສະພາບແວດລ້ອມທີ່ແຫ້ງແລ້ງ,ຂະຫຍາຍຊີວິດການບໍລິການ。
2.ກະລຸນາຫຼີກລ່ຽງການປຽກຊຸ່ມໃນລະດູຝົນ、ໃຊ້ໃນສະພາບແວດລ້ອມທີ່ຜິດປົກກະຕິເຊັ່ນ: ຕຸ່ມໂພງ,ຂະຫຍາຍຊີວິດການບໍລິການ。
3.ກະລຸນາຮັກສາຊ່ອງຫມໍ້ໄຟແລະພື້ນທີ່ shrapnel ໂລຫະທໍາຄວາມສະອາດ。
4.ກະລຸນາຫຼີກລ້ຽງການບີບ ແລະວາງເຄື່ອງຄວບຄຸມໄລຍະໄກ, ເຊິ່ງອາດຈະເຮັດໃຫ້ເກີດຄວາມເສຍຫາຍ.。
5.ບໍ່ໃຊ້ເປັນເວລາດົນນານ,ກະລຸນາຖອດແບັດເຕີຣີອອກ,ແລະເກັບຮັກສາການຄວບຄຸມໄລຍະໄກແລະຫມໍ້ໄຟໃນບ່ອນທີ່ສະອາດແລະປອດໄພ。
6.ຈ່າຍເອົາໃຈໃສ່ກັບຄວາມຊຸ່ມ - ຫຼັກຖານສະແດງແລະການພິສູດຊ shock ອກໃນລະຫວ່າງການເກັບຮັກສາແລະການຂົນສົ່ງ。
10.ຂໍ້ມູນຄວາມປອດໄພ
1.ກະລຸນາອ່ານຄໍາແນະນໍາສໍາລັບໃຊ້ໃນລາຍລະອຽດກ່ອນການນໍາໃຊ້,ບຸກຄະລາກອນທີ່ບໍ່ແມ່ນມືອາຊີບແມ່ນຖືກຫ້າມ。
2.ກະລຸນາປ່ຽນຫມໍ້ໄຟໃນເວລາທີ່ແບັດເຕີຣີຕໍ່າເກີນໄປ,ຫຼີກເວັ້ນການຜິດພາດທີ່ເກີດຈາກພະລັງງານຫມໍ້ໄຟບໍ່ພຽງພໍເຮັດໃຫ້ການຄວບຄຸມໄລຍະໄກບໍ່ສາມາດເຮັດວຽກໄດ້.。
4.ຖ້າຕ້ອງການສ້ອມແປງ,ກະລຸນາຕິດຕໍ່ຜູ້ຜະລິດ,ຖ້າຄວາມເສຍຫາຍທີ່ເກີດຈາກການສ້ອມແປງຕົນເອງ,ຜູ້ຜະລິດຈະບໍ່ໃຫ້ການຮັບປະກັນ。


-500x650.png)

-500x650.png)
