
Mesin gergaji wayar crawler memotong automatik alat kawalan jauh tanpa wayar
DH12S-2R-LLD-485 Crawler Rope melihat kawalan jauh
Penerangan


Alat kawalan jauh pemotongan automatik crawler saw sesuai untuk mesin pemotong gergaji dawai crawler,Gunakan protokol 485Modbus RTU untuk mengawal penyongsang perangkak kiri dan kanan,Serta pengawalan kelajuan penukaran frekuensi motor yang besar dan pengawal arah depan, belakang, kiri dan kanan。Dan arus kerja penyongsang motor besar boleh dibaca melalui protokol RTU 485-Modbus,Analisis dan perbandingan arus motor besar pada permulaan,Laraskan kelajuan trek kiri dan kanan secara automatik dalam masa nyata,Realisasikan fungsi pemotongan automatik。

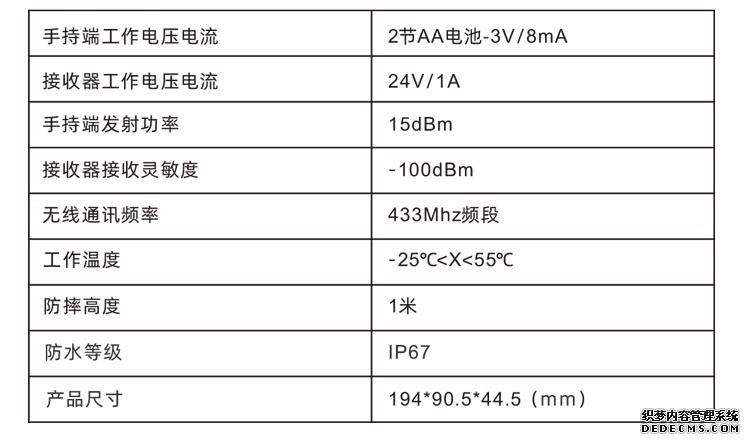
1.Menggunakan teknologi komunikasi tanpa wayar 433MHz,Jarak operasi tanpa wayar 100 meter。
2.Mengamalkan fungsi melompat frekuensi automatik,Gunakan 32 set kawalan jauh tanpa wayar pada masa yang sama,Tidak mempengaruhi satu sama lain。
3.Menyokong semua penukar frekuensi dengan protokol RTU 485-Modbus,Jenama penyongsang yang disesuaikan pada masa ini termasuk: Shanghai Xielin、Fuji、Huichuan、Zhongchen、INVT、Yasukawa Tatsu。Jika jenama tidak disesuaikan, sila hubungi kami untuk penyesuaian.。
4.Menyokong permulaan penyongsang motor besar、peraturan kelajuan、Bacaan semasa。
5.Menyokong pelarasan kelajuan penyongsang perangkak kiri dan kanan、mulakan、Kawalan kiri dan kanan depan dan belakang。
6.Sokong pembetulan linear penyongsang crawler kiri dan kanan,Pastikan mesin bergerak dalam garis lurus。
7.Sokongan wayar gergaji fungsi pemotongan automatik,Mengikut maklumat arus motor besar,Laraskan kelajuan trek kiri dan kanan secara automatik dalam masa nyata。
8.Ia juga serasi dengan output IO langsung untuk mengawal permulaan dan berhenti motor.,Output voltan analog mengawal kelajuan motor。



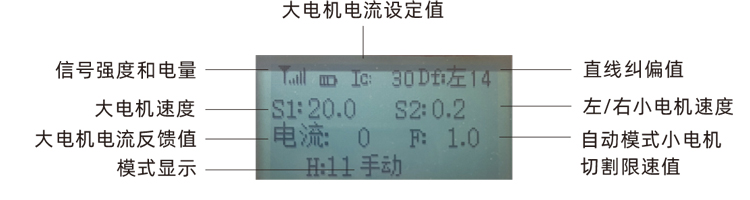
Komen: ①Paparan skrin:
②Suis mod:
Gunakan suis 2 kelajuan,Boleh bertukar antara mod automatik dan manual,Akan ada peralihan paparan mod yang sepadan pada skrin paparan.。
③ Dayakan:
Butang gabungan,Sesetengah operasi memerlukan menekan dan menahan butang daya untuk beroperasi,Lihat perihalan setiap suis untuk mendapatkan butiran.。
④Suis motor besar:
Gunakan suis set semula 3-kelajuan,flip suis ini,Boleh mengawal putaran ke hadapan dan belakang motor besar,Status akan kekal selepas dilepaskan,Akan ada paparan yang sepadan pada paparan,↑Anak panah menunjukkan putaran ke hadapan,↓Anak panah menunjukkan pembalikan。
⑤Suis ke hadapan/balik motor kecil:
Gunakan suis pengunci diri 3 kelajuan,flip suis ini,Boleh mengawal motor kecil untuk bergerak ke hadapan dan ke belakang,Akan ada paparan yang sepadan pada paparan,↑Anak panah bermaksud bergerak ke hadapan,↓Anak panah menunjukkan untuk kembali。
⑥ Suis kuasa kawalan jauh:
Nilai kelajuan motor besar berubah kira-kira 0.2 unit, Menggunakan tombol pengekod berbilang pusingan,Pusing tombol,Laraskan kelajuan motor besar S1。1 bingkai setiap pusingan, Putaran pantas boleh mengubah suai nilai kelajuan motor yang besar。
⑦Suis pusing motor kecil:
Gunakan suis set semula 3-kelajuan,Hidupkan suis ini dalam mod manual,Boleh mengawal motor kecil untuk membelok kiri dan kanan,Alat kawalan jauh akan menghentikan tindakan ini secara automatik selepas melepaskannya.。 Dalam keadaan hadapan,flip suis ini,Akan ada paparan yang sepadan pada paparan,←Anak panah menunjukkan belok kiri,→Anak panah menunjukkan membelok ke kanan。 Dalam keadaan berundur,flip suis ini,Akan ada paparan yang sepadan pada paparan,←Anak panah menunjukkan belok kiri,→Anak panah menunjukkan membelok ke kanan。 Tekan dan tahan untuk mendayakan,Kemudian flip suis ini,Boleh melaksanakan fungsi pusingan in-situ,Pusing lebih laju。
⑧Regulasi kelajuan motor besar :
Nilai kelajuan motor besar berubah kira-kira 0.2 unit, Menggunakan tombol pengekod berbilang pusingan,Pusing tombol,Laraskan kelajuan motor besar S1。1 bingkai setiap pusingan, Putaran pantas boleh mengubah suai nilai kelajuan motor yang besar。
⑨Peraturan kelajuan motor kecil:
(Pembetulan sisihan linear) menggunakan tombol pengekod berbilang pusingan,Dalam mod manual,Setiap kali tombol dipusing 1 langkah,Nilai kelajuan motor kecil berubah kira-kira 0.1 unit,Putaran pantas boleh mengubah suai nilai kelajuan motor kecil dengan cepat。Dalam mod automatik,Tekan butang dayakan,Kemudian putar 1 bingkai setiap kali,Nilai had laju motor kecil F berubah kira-kira 0.1 unit,Putaran pantas boleh mengubah suai nilai had laju motor kecil dengan pantas。Tekan butang dayakan,Pusing tombol ke kanan,Paparan pembetulan garis lurus:Df:kiri,Setiap pusingan tombol bertambah sebanyak 1 unit.;Pusing tombol ke kiri,Paparan pembetulan garis lurus:Df:betul,Setiap pusingan tombol bertambah sebanyak 1 unit.;Setiap unit pembetulan sepadan dengan voltan AVI peraturan kelajuan motor kira-kira 0.02V.。



Langkah pemasangan produk
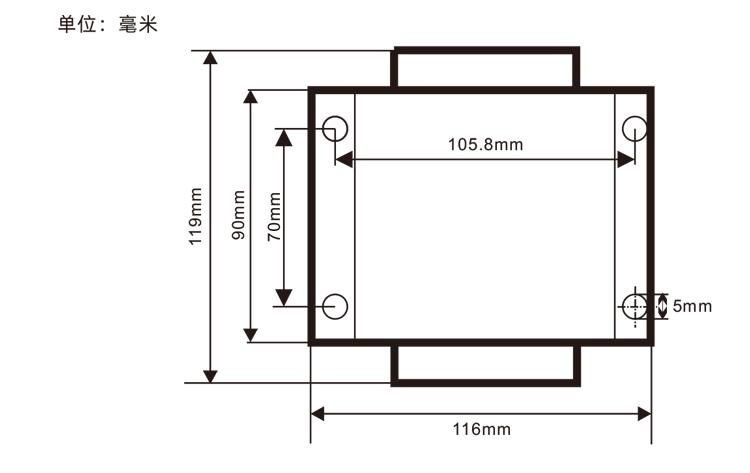
1.Pasang penerima ke dalam kabinet elektrik melalui gesper di bahagian belakang,Atau pasangkannya dalam kabinet elektrik melalui lubang skru di empat penjuru penerima。
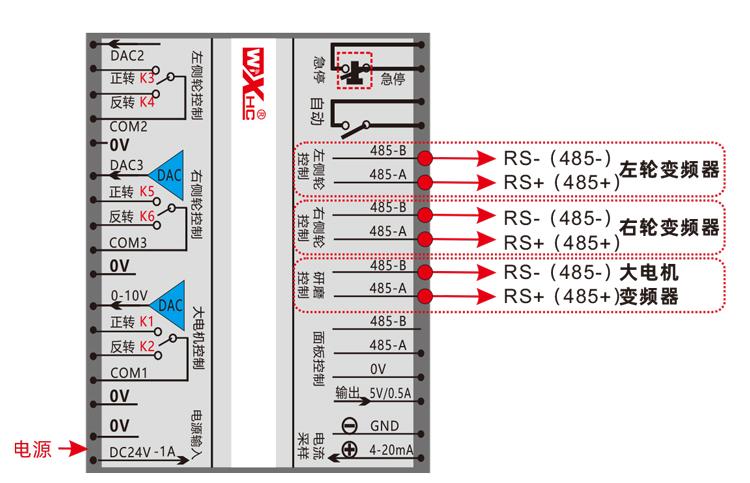
2.Rujuk gambarajah pendawaian penerima kami,Semak terhadap peralatan lapangan anda,Sambungkan peranti ke penerima melalui wayar。
3.Selepas penerima dibetulkan,Antena yang dilengkapi dengan penerima mesti disambungkan,Dan pasang atau letakkan hujung luar antena di luar kabinet elektrik,Adalah disyorkan untuk meletakkannya di bahagian atas kabinet elektrik untuk kesan isyarat terbaik.,Dilarang membiarkan antena tidak bersambung,Atau letakkan antena di dalam kabinet elektrik,Ini boleh mengakibatkan isyarat lemah dan tidak boleh digunakan。
4.Akhir sekali, pasangkan bateri dalam alat kawalan jauh,Ketatkan penutup bateri,Kemudian hidupkan suis kuasa kawalan jauh,Paparan alat kawalan jauh akan menunjukkan antara muka kerja biasa.,Anda boleh melakukan operasi kawalan jauh。
Dimensi pemasangan penerima
Gambarajah rujukan pendawaian penerima

Tetapan parameter kawalan jauh
Masukkan kaedah parameter latar belakang kawalan jauh:Alihkan suis mod ke mod manual,Laraskan kelajuan motor kecil kepada 25, atau 0、10、20、40、50,Tarik suis putaran hadapan motor besar ke atas 3 kali berturut-turut,Tarik ke bawah 3 kali berturut-turut;
Gunakan tombol "Pelarasan Kelajuan Motor Kecil" untuk membelok halaman,Selepas menekan dayakan, putar tombol kawalan kelajuan motor kecil untuk mengubah suai parameter.; Selepas pengubahsuaian,Pusing halaman hingga akhir,Pilih Simpan dan Keluar,Tekan butang dayakan untuk keluar dari menu;
Parameternya adalah seperti berikut: Arus maksimum:Julat nilai maklum balas arus motor besar,Julat tetapan 15-200A,Lalai 60;
Parameter kawalan kelajuan:Mod automatik motor kecil secara automatik mempercepatkan kelajuan,Lebih kecil, lebih cepat,Julat tetapan 200-1500, Lalai 1000;
Parameter nyahpecutan:Tetapkan had atas untuk perubahan kelajuan motor yang dibenarkan,Apabila perubahan semasa melebihi nilai ini,akan perlahan。 Semakin kecil,Motor kiri dan kanan memecut lebih laju,Julat 05-12,Lalai 06;
Mula mengunci diri: Pecutan a1:Lebih besar motor, lebih cepat kelajuan meningkat.,Julat 00-06,Lalai 01;
Nyahpecutan a2:Semakin besar kelajuan motor, semakin cepat ia akan berkurangan.,Julat 00-06,Lalai 02;
Dayakan pelarasan kelajuan:Adakah perlu menekan Dayakan untuk melaraskan kelajuan motor kecil?,00Lumpuhkan,01membolehkan,Lalai 01;
Adakah motor besar akan mengekalkan penguncian sendiri secara automatik selepas suis hadapan dan belakang dilepaskan?,00tidak mengekalkan,01Simpan,Lalai 01;
berjalan kaki maksimum:Kelajuan maksimum motor kiri dan kanan,Julat 10-100,Lalai 50;
Memotong arus:Arus pemotongan maksimum,Skrin memaparkan nilai IC,Julat 15-160,Lalai 30,IC paparan yang sepadan dengan skrin:30。Had atas parameter ini = arus maksimum x80%;
Had laju lalai:Kelajuan pemotongan automatik motor kecil lalai pada permulaan,Julat 00-100,Lalai 10,Skrin hendaklah memaparkan F1.0,Parameter ini hanya tepat apabila berjalan maksimum ditetapkan kepada 50。
saluran wayarles:Lalai 10,Apabila isyarat kawalan jauh tidak stabil,Atau apabila terdapat gangguan isyarat di tapak,Parameter ini boleh diubah suai,tukar saluran,elakkan gangguan;
mengimbangi had laju:Had atas kelajuan pemotongan automatik motor kecil,Julat 00-200,Lalai 60,Skrin sepadan dengan paparan 6.0;Had atas nilai paparan = had laju diimbangi × 0.1;
hos terbesar:Kelajuan maksimum motor besar,Julat 10-100,Lalai 50;
peranti mbus (diperlukan):Pemilihan model penyongsang motor besar,Julat 00-03,Lalai 03;
00-Shanghai Xielin 01-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
peranti sbus (diperlukan):Pemilihan model penyongsang motor kecil,Julat 00-05,Lalai 03;
00-Shanghai Xielin 01-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
04-Yasukawa Tatsu 05-Tiada
Tetapan parameter penukar frekuensi
1.Pemilihan sumber arahan:Saluran arahan komunikasi
2.Pemilihan sumber frekuensi utama:komunikasi yang diberikan
3.kadar baud:19200
4.Format data:Tiada checksum,Format data<8-N-1>
5.Alamat tempatan:Penukar frekuensi kiri ditetapkan kepada 1,Penukar frekuensi yang betul ditetapkan kepada 2,Penyongsang motor besar ditetapkan kepada 3
Arahan pengendalian alat kawalan jauh
1.Mesin dihidupkan,Kuasa kawalan jauh di,Masukkan latar belakang kawalan jauh,Tetapkan parameter latar belakang alat kawalan jauh,Perkara utama ialah menetapkan model penyongsang motor kecil dan motor besar (langkau langkah ini jika pengeluar mesin telah menetapkannya);
2.Tetapkan parameter penyongsang (langkau langkah ini jika pengeluar mesin telah menetapkannya);
3.Tukar alat kawalan jauh ke mod manual,Kemudian gunakan alat kawalan jauh untuk mengalihkan mesin ke kedudukan kerja;
4.Dalam mod manual,Tetapkan nilai tetapan arus pemotongan motor besar IC,Tetapkan kelajuan motor maksimum;
5.Tukar kepada mod automatik,Tetapkan nilai F had kelajuan pemotongan motor kecil;
6.Dalam mod automatik,Putar suis motor besar ke hadapan untuk menghidupkan motor besar,Kemudian putar suis motor kecil ke gear ke hadapan atau undur,Alat kawalan jauh memasuki mod pemotongan automatik,Mula memotong。


1.Sila simpan pada suhu dan tekanan biasa,Gunakan dalam persekitaran yang kering,Memanjangkan hayat perkhidmatan。
2.Tolong elakkan daripada terkena hujan、Gunakan dalam persekitaran yang tidak normal seperti lepuh,Memanjangkan hayat perkhidmatan。
3.Sila pastikan petak bateri dan kawasan serpihan logam bersih。
4.Sila elakkan memerah dan menjatuhkan alat kawalan jauh, yang boleh menyebabkan kerosakan.。
5.Tidak lama digunakan,Sila keluarkan bateri,Dan menyimpan kawalan jauh dan bateri di tempat yang bersih dan selamat。
6.Beri perhatian kepada kalis lembapan dan kalis kejutan semasa menyimpan dan mengangkut。

1.Sila baca arahan dengan teliti sebelum digunakan,Operasi oleh bukan profesional dilarang。
2.Sila gantikan bateri dalam masa apabila bateri terlalu rendah,Elakkan ralat yang disebabkan oleh kuasa bateri yang tidak mencukupi menyebabkan alat kawalan jauh tidak dapat beroperasi.。
3.Memerlukan pembaikan,Sila hubungi pengeluar,Sekiranya kerosakan disebabkan oleh pembaikan diri,Pengilang tidak akan memberikan jaminan。
(Catatan:Keadaan naik taraf atau naik taraf produk,Apabila membeli produk, sila hubungi kakitangan jualan untuk status produk terkini)
-500x650.png)




