
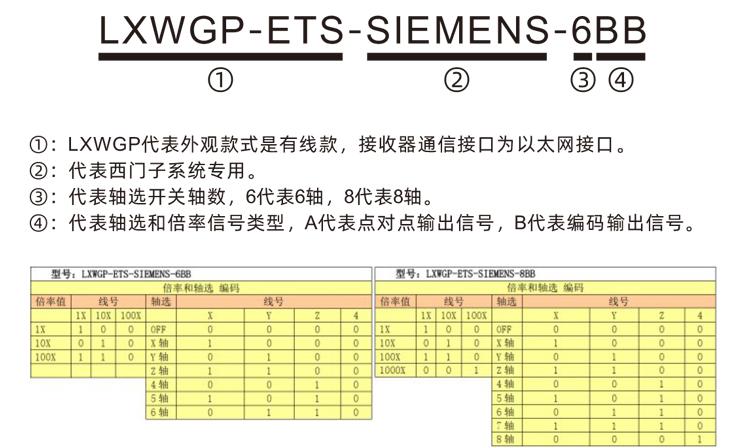
LXWGP-ETS-SIEMENS wired electronic handwheel
Descriptio


电子手轮是用于数控机床手动引导、locus、Percute Opera Omnia。Hoc exemplar manu rotae electronicae est Siemens manu filum electronicum cum reali ostentatione.,Rota ad X130 interfaciei systematis Siementium per funem retis iungitur.,Lege coordinatas systematis easque ostende ad LCD ostentationem manus rotae per S7 protocollum communicationis.,Et ratio handwheel axi lectio per communicationem fieri potest.、magnificatio、Button and other signals。

1.采用6芯航空插头线缆连接,手轮线缆长度10米。
2.手轮屏幕可以显示系统工件坐标、机械坐标、进给速度、轴选、倍率等信息。
3.Support subitis subsisto button,Switching quantitas IO signum output,手轮关机急停依然有效。
4.支持6个自定义按钮,Switching IO signum,可以通过IO接线或通信输出信号给系统。
5.支持6或8轴控制,Switching IO signum,可以通过IO接线或通信输出信号给系统。
6.支持3或4档倍率控制,Switching IO signum,可以通过IO接线或通信输出信号给系统。
7.Support Pulse encoder,100Pulsus / Circulus,可以通过AB脉冲接线输出信号给系统。
8.Support Siemens S7 protocol,Siemens 828D、840DSL、Unum et aliud exemplar systemata。

| 手轮工作电源电压 | DC24V/1A |
| 接收器电源电压 | DC24V/1A |
| 接收器IO输出负载范围 |
DC24V
|
| 手轮端线缆长度 |
10m
|
| 接收器端线缆长度 |
1m
|
| 接收器端网线长度 |
3m
|
| 工作温度 |
-25℃<X<55℃
|
| 防摔高度 |
1m
|
| 自定义按钮数量 | 6个 |
| 产品尺寸 | 233*90.7*77.4(mm) |


Commentatio:
①Mergency subsisto button:
Torcular ad subitis subsisto button,Duo coetibus subitis subsisto io outputs in recipientis sunt disconnected,Et omnes munera handwheel sunt irritum。
Post subitis nolite dimissi,Subitis subsisto i output clausit in recipientis,Omnes munera Handwheel restituantur。
②screen ostentationem:
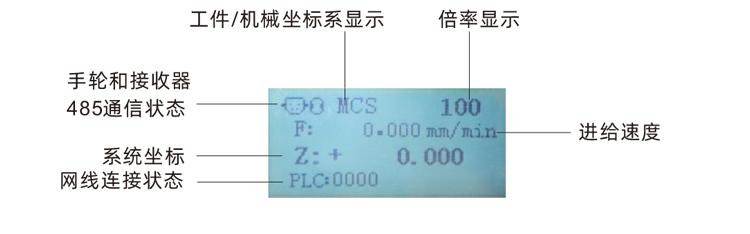
PLC:0000代表网线没有连通,PLC:1010代表网线和PLC系统连接成功,
PLC:1110代表手轮写入系统数据成功,PLC:0001代表连接电脑成功。
③custom bullarum:
6Custom Bullae,Quisque button correspondet ad IO output punctum in recipientis,也通过通信与系统连接。
④axis selectio switch:
Switching axis lectio switch potest switch movens axem imperium per handwheel。
⑤使能按钮:
Torcular et tenere poterit button utrinque,Et vehicula pulsus encoder est effective。 Et duo coetibus in recipientis activare i output conduction,Release the activare button,Admitte O output Disiunctio。
⑥倍率开关:
Switch magnificationis switch ad switch et magnificatio imperium per handwheel。
⑦脉冲编码器:
Torcular et tenere ad activare button,Pulse encoder,Mitte pulsus signum,Control Machina Shaft motus。
⑧手轮线缆:
手轮和接收器连接的线缆,航空插头,用于手轮供电和通信。



6.1Product installation gradus
1.将接收器通过四个角的螺丝孔将其安装在电柜里。
2.Refer ad receptaculum Wiring Diagram,Compare vestri on-site apparatu,将设备通过线缆和接收器
连接,用网线把接收器和系统的X130接口连接好。
3.Post receptam fixa,将航空插头底座安装在面板的手轮开孔位置,底座另一
端线排插在接收器上的手轮接口处。然后将手轮端线缆航空插头插入底座,拧紧
固定装置。
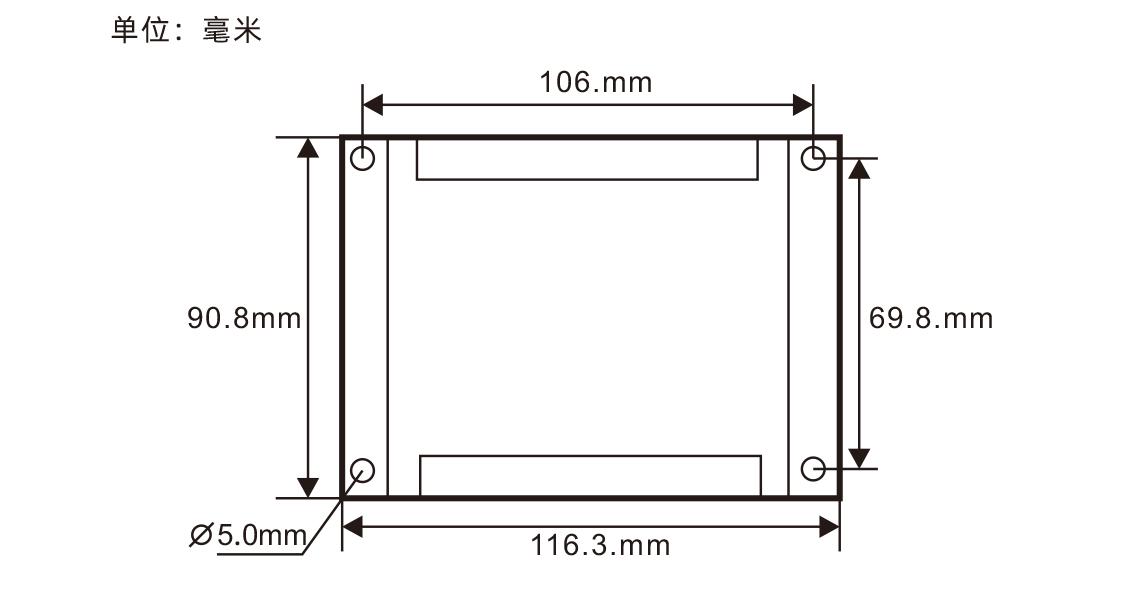
6.2Receptor installation magnitudine
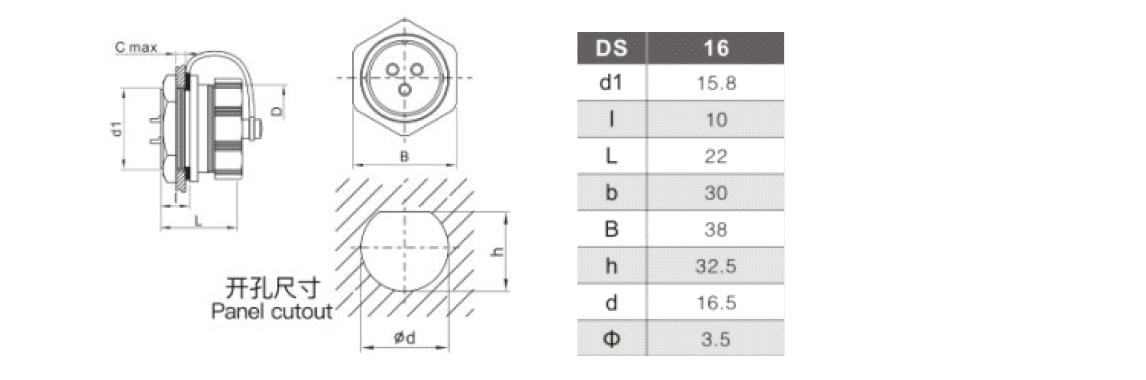
6.3航空插头安装尺寸
6.4Receptor Wiring reference Diagram

6.2Receptor installation magnitudine
6.3航空插头安装尺寸
6.4Receptor Wiring reference Diagram

1.接收器通电,接收器工作指示灯闪亮,用网线将接收器和电脑连接,设置电脑的固定IP地址,使用网络配置工具软件对手轮功能进行网络参数设置,具体设置
方法参考《LXWGP-ETS有线手轮的使用说明》。
2.接收器设置完成之后,系统需要编程PLC程序,具体请参考《LXWGP-ETS不同西门子数控系统的设置方法》以及PLC程序例程资料。
3.以上设置完成之后,将接收器拿到机器电柜安装好,网线从电脑拔出插到系统的X130接口上,接收器电源和脉冲线插好。
4.机器通电,接收器通电,接收器工作指示灯闪亮,打开手轮电源开关,手轮屏幕开机,屏幕显示PLC:1010,代表手轮和系统通信成功。
5.选中轴选:切换轴选开关,选中你要操作的轴。
6.选中倍率:切换倍率开关,选中你需要的倍率档。
7.移动轴:Torcular et tenere ad activare button,选中轴选开关,选中倍率开关,然后转动脉冲编码器,顺时针转动正向移动轴,逆时针转动负向移动轴。
8.按住任意自定义按钮,接收器对应按钮IO输出打开,松开按钮输出关闭。
9.Torcular ad subitis subsisto button,接收器对应急停IO输出断开,手轮功能失效,释放急停按钮,急停IO输出闭合,手轮功能恢复。


| 故障情形 | 可能发生原因 |
故障排除方法
|
|
|
故障排除方法
|
1.手轮和接收器之间的航空线缆是否正确可靠连接
2.接收器电源电压是否足够
3.手轮故障
|
1.检查手轮和接收器之间的航空线缆的连接情况
2.检查接收器输入电源
3.联系厂家返厂检修
|
|
| 手轮操作无反应 |
1.接收器和系统的网线是否连接
2.系统PLC程序是否写好
3.接收器配置是否设置正确
4.手轮显示屏485通信图标是否显示失败
5.操作手轮时,需要按住两侧的使能按钮
6.急停按钮是否释放
|
1.检查接收器和系统X130网口是否用网线连接
2.检查确认系统PLC是否按照我们提供的参考资料写好
3.检查确认接收器是否参考我们的资料和提供的工具软件,正确的设置了接收器的网络参数和DB地址等
4.检查手轮和接收器之间的
6芯绿色插座,其中的两根通信线:485-A和485-B,是否正确并牢固连接,是否存在断路的情况
|
|
|
接收器通电后,接收器上工作灯不亮
|
1.电源异常
2.电源接线错误
3.接收器故障
|
1.检查电源是否有电压,
电压大小是否符合要求
2.检查电源正负极是否接反
3.返厂维修
|

1.Placere ad locus temperatus et pressura,Usus est in siccis environments,Vita extend muneris。
2.Quaeso ne questus infectum in pluvia、Usus est in abnormes environments ut pusters,Vita extend muneris。
3.Placere servo Handwheel mundum,Vita extend muneris。
4.Quaeso ne excerpent、Incido、Bumping, etc.,Ne praecisione Accessories intra Handwheel ex damnum vel accuracy errores。
5.Non propter longo tempore,Placere copia handwheel in mundum et tutum est。
6.Operam ad humorem probationem et inpulsa-probationem in repono et translationem。

1.Placere legunt instructiones ad usum in detail ante usum,Non-professional personas prohibitus。
2.手轮出现任何非正常情况后,请立即停止使用,并且排查故障,在故障排除前,禁止再使用故障手轮,避免因手轮未知故障而发生安全事故;
3.Si reficere non requiritur,Placere contact fabrica,Si damnum fecit per sui instaurabo,Et manufacturer non providere a warantum。




.png)
