
ລວດອ້ຽງຕົວກວາດໄດ້ເຫັນເຄື່ອງຈັກອັດຕະໂນມັດຕັດການຄວບຄຸມໄລຍະໄກແບບໄຮ້ສາຍ
DH12S-2R-2R-LD-485 ສາຍເຊືອກ Sawler ໄດ້ເຫັນການຄວບຄຸມໄລຍະໄກ
ລາຍລະອຽດ


ສາຍ crawler saw ຕັດອັດຕະໂນມັດການຄວບຄຸມໄລຍະໄກແມ່ນເຫມາະສົມສໍາລັບ crawler wire saw ເຄື່ອງຕັດ,ໃຊ້ 485Modbus RTU protocol ເພື່ອຄວບຄຸມຕົວກວາດເວັບທາງຊ້າຍແລະຂວາ,ເຊັ່ນດຽວກັນກັບການຄວບຄຸມຄວາມໄວການແປງຄວາມຖີ່ motor ຂະຫນາດໃຫຍ່ເລີ່ມຕົ້ນແລະທາງຫນ້າ, ຫລັງ, ຊ້າຍແລະຂວາຄວບຄຸມທິດທາງ。ແລະປະຈຸບັນການເຮັດວຽກຂອງ inverter motor ຂະຫນາດໃຫຍ່ສາມາດອ່ານໄດ້ໂດຍຜ່ານ 485-Modbus RTU protocol,ການວິເຄາະແລະການປຽບທຽບກະແສໄຟຟ້າຂະຫນາດໃຫຍ່ໃນເວລາເລີ່ມຕົ້ນ,ປັບຄວາມໄວຕິດຕາມຊ້າຍ ແລະຂວາໂດຍອັດຕະໂນມັດໃນເວລາຈິງ,ຮັບຮູ້ຟັງຊັນການຕັດອັດຕະໂນມັດ。

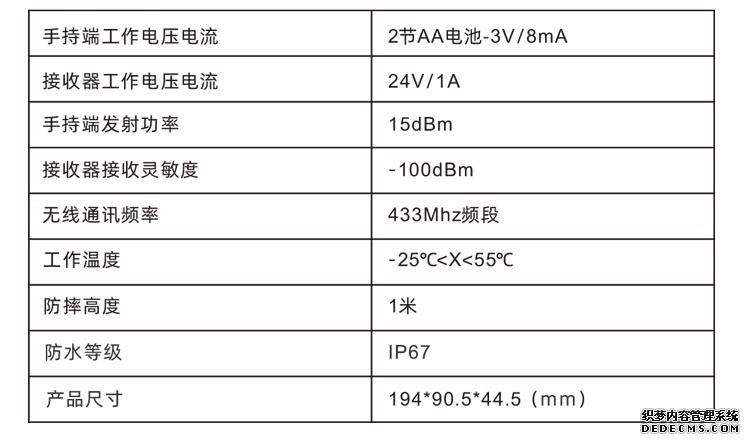
1.ຮັບຮອງເອົາເຕັກໂນໂລຢີການສື່ສານໄຮ້ສາຍ 43MHZ,ໄລຍະການໃຊ້ງານໄຮ້ສາຍ 100 ແມັດ。
2.ຮັບຮອງເອົາຟັງຊັນຄວາມຖີ່ຂອງອັດຕະໂນມັດ,ໃຊ້ 32 ຂະຫນາດຂອງການຄວບຄຸມໄລຍະໄກທີ່ບໍ່ມີສາຍໃນເວລາດຽວກັນ,ບໍ່ມີຜົນກະທົບຕໍ່ກັນແລະກັນ。
3.ຮອງຮັບທຸກຕົວປ່ຽນຄວາມຖີ່ດ້ວຍ 485-Modbus RTU protocol,ຍີ່ຫໍ້ inverter ປັບຕົວໃນປັດຈຸບັນປະກອບມີ: Shanghai Xielin、ຟູຈິ、ຮຸຍຊວນ、Zhongchen、INVT、Yasukawa Tatsu。ຖ້າຍີ່ຫໍ້ບໍ່ຖືກດັດແປງ, ກະລຸນາຕິດຕໍ່ພວກເຮົາສໍາລັບການປັບແຕ່ງ.。
4.ສະຫນັບສະຫນູນການເລີ່ມຕົ້ນ inverter motor ຂະຫນາດໃຫຍ່、ລະບຽບການຄວາມໄວ、ການອ່ານປະຈຸບັນ。
5.ຮອງຮັບການປັບຄວາມໄວຂອງຕົວກວາດເວັບຕົວກວາດເວັບຊ້າຍແລະຂວາ、ເລີ່ມຂຶ້ນ、ການຄວບຄຸມດ້ານຫນ້າແລະຫລັງຊ້າຍແລະຂວາ。
6.ສະຫນັບສະຫນູນການແກ້ໄຂເສັ້ນ inverter ຕົວກວາດເວັບຊ້າຍແລະຂວາ,ຮັກສາເຄື່ອງເຄື່ອນທີ່ໃນເສັ້ນຊື່。
7.ສາຍສະຫນັບສະຫນູນໄດ້ເຫັນການທໍາງານຂອງການຕັດອັດຕະໂນມັດ,ອີງຕາມຂໍ້ມູນ motor ຂະຫນາດໃຫຍ່ໃນປະຈຸບັນ,ປັບຄວາມໄວຕິດຕາມຊ້າຍ ແລະຂວາໂດຍອັດຕະໂນມັດໃນເວລາຈິງ。
8.ມັນຍັງເຂົ້າກັນໄດ້ກັບຜົນຜະລິດ IO ໂດຍກົງເພື່ອຄວບຄຸມການເລີ່ມຕົ້ນແລະຢຸດ motor.,ຜົນຜະລິດແຮງດັນອະນາລັອກຄວບຄຸມຄວາມໄວຂອງມໍເຕີ。



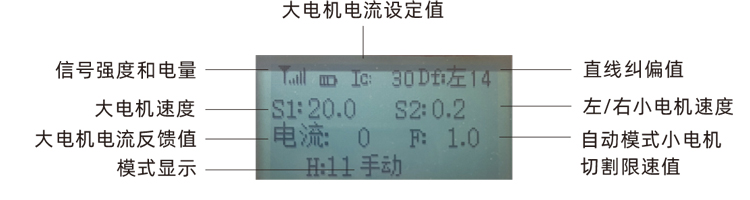
ຄໍາເຫັນ: ①ຈໍສະແດງຜົນ:
②ສະຫຼັບໂໝດ:
ນຳໃຊ້ສະວິດ 2 ຄວາມໄວ,ສາມາດປ່ຽນລະຫວ່າງໂຫມດອັດຕະໂນມັດແລະຄູ່ມື,ຈະມີການສະຫຼັບຮູບແບບທີ່ສອດຄ້ອງກັນໃນຫນ້າຈໍສະແດງຜົນ.。
③ ເປີດໃຊ້:
ປຸ່ມປະສົມ,ການດໍາເນີນງານບາງອັນຮຽກຮ້ອງໃຫ້ມີການກົດຄ້າງໄວ້ເພື່ອເປີດໃຊ້ງານ,ເບິ່ງລາຍລະອຽດຂອງແຕ່ລະສະວິດສໍາລັບລາຍລະອຽດ.。
④ ສະຫຼັບມໍເຕີຂະຫນາດໃຫຍ່:
ນຳໃຊ້ສະວິດຣີເຊັດ 3 ຄວາມໄວ,ພິກສະຫຼັບນີ້,ສາມາດຄວບຄຸມການຫມຸນຕໍ່ແລະປີ້ນກັບເຄື່ອງຈັກຂະຫນາດໃຫຍ່,ສະຖານະພາບຈະຍັງຄົງຢູ່ຫຼັງຈາກປ່ອຍໃຫ້ໄປ,ຈະມີການສະແດງຜົນທີ່ສອດຄ້ອງກັນຢູ່ໃນຈໍສະແດງຜົນ,↑ ລູກສອນຊີ້ບອກການຫມຸນໄປຂ້າງຫນ້າ,↓ ລູກສອນຊີ້ບອກການປີ້ນກັບ。
⑤ ສະຫຼັບໄປໜ້າ/ປີ້ນມໍເຕີຂະໜາດນ້ອຍ:
ນຳໃຊ້ສະວິດລັອກຕົນເອງ 3 ຄວາມໄວ,ພິກສະຫຼັບນີ້,ສາມາດຄວບຄຸມມໍເຕີຂະຫນາດນ້ອຍເພື່ອກ້າວໄປຂ້າງຫນ້າແລະຖອຍຫລັງ,ຈະມີການສະແດງຜົນທີ່ສອດຄ້ອງກັນຢູ່ໃນຈໍສະແດງຜົນ,↑ລູກສອນໝາຍເຖິງການກ້າວໄປຂ້າງໜ້າ,↓ ລູກສອນຊີ້ບອກການກັບຄືນ。
⑥ ສະຫຼັບພະລັງງານຄວບຄຸມໄລຍະໄກ:
ຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່ມີການປ່ຽນແປງປະມານ 0.2 ຫນ່ວຍ, ການນໍາໃຊ້ລູກບິດການເຂົ້າລະຫັດຫຼາຍຫັນ,ຫັນລູກບິດ,ປັບຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່ S1。1 ເຟຣມຕໍ່ລ້ຽວ, ການຫມຸນວຽນຢ່າງໄວວາສາມາດດັດແປງມູນຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່。
⑦ສະວິດຫັນ motor ຂະຫນາດນ້ອຍ:
ນຳໃຊ້ສະວິດຣີເຊັດ 3 ຄວາມໄວ,ປ່ຽນສະວິດນີ້ຢູ່ໃນໂໝດຄູ່ມື,ສາມາດຄວບຄຸມມໍເຕີຂະຫນາດນ້ອຍເພື່ອຫັນຊ້າຍແລະຂວາ,ການຄວບຄຸມໄລຍະໄກຈະຢຸດການດໍາເນີນການນີ້ອັດຕະໂນມັດຫຼັງຈາກປ່ອຍໃຫ້ໄປ.。 ໃນສະຖານະການຕໍ່ຫນ້າ,ພິກສະຫຼັບນີ້,ຈະມີການສະແດງຜົນທີ່ສອດຄ້ອງກັນຢູ່ໃນຈໍສະແດງຜົນ,← ລູກສອນຊີ້ບອກລ້ຽວຊ້າຍ,→ລູກສອນຊີ້ບອກການລ້ຽວຂວາ。 ໃນສະຖານະການ retreat,ພິກສະຫຼັບນີ້,ຈະມີການສະແດງຜົນທີ່ສອດຄ້ອງກັນຢູ່ໃນຈໍສະແດງຜົນ,← ລູກສອນຊີ້ບອກລ້ຽວຊ້າຍ,→ລູກສອນຊີ້ບອກການລ້ຽວຂວາ。 ກົດຄ້າງໄວ້ເພື່ອເປີດໃຊ້ງານ,ຈາກນັ້ນປິດສະວິດນີ້,ສາມາດປະຕິບັດຫນ້າທີ່ການຫັນ in-site,ຫັນໄວຂຶ້ນ。
⑧ລະບຽບຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່ :
ຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່ມີການປ່ຽນແປງປະມານ 0.2 ຫນ່ວຍ, ການນໍາໃຊ້ລູກບິດການເຂົ້າລະຫັດຫຼາຍຫັນ,ຫັນລູກບິດ,ປັບຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່ S1。1 ເຟຣມຕໍ່ລ້ຽວ, ການຫມຸນວຽນຢ່າງໄວວາສາມາດດັດແປງມູນຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່。
⑨ກົດລະບຽບຄວາມໄວມໍເຕີຂະຫນາດນ້ອຍ:
(ການແກ້ໄຂການບ່ຽງເບນເສັ້ນ) ນຳໃຊ້ລູກບິດຕົວເຂົ້າລະຫັດແບບຫຼາຍລ້ຽວ,ໃນຮູບແບບຄູ່ມື,ແຕ່ລະຄັ້ງຫັນລູກບິດ 1 ກ້າວ,ຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍປ່ຽນແປງປະມານ 0.1 ຫນ່ວຍ,ການຫມຸນໄວສາມາດດັດແປງມູນຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍໄດ້ໄວ。ໃນຮູບແບບອັດຕະໂນມັດ,ກົດປຸ່ມເປີດໃຊ້ງານ,ຈາກນັ້ນ ໝຸນ 1 ເຟຣມແຕ່ລະເທື່ອ,ຄ່າຈໍາກັດຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ F ປ່ຽນແປງປະມານ 0.1 ຫນ່ວຍ,ພືດຫມູນວຽນໄວສາມາດດັດແປງມູນຄ່າຈໍາກັດຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍໄດ້ໄວ。ກົດປຸ່ມເປີດໃຊ້ງານ,ລ້ຽວຂວາ,ການສະແດງການແກ້ໄຂເສັ້ນຊື່:Df:ຊ້າຍ,ແຕ່ລະຄັ້ງຂອງລູກບິດເພີ່ມຂຶ້ນ 1 ຫນ່ວຍ.;ຫັນປຸ່ມຊ້າຍ,ການສະແດງການແກ້ໄຂເສັ້ນຊື່:Df:ຖືກຕ້ອງ,ແຕ່ລະຄັ້ງຂອງລູກບິດເພີ່ມຂຶ້ນ 1 ຫນ່ວຍ.;ແຕ່ລະຫນ່ວຍການແກ້ໄຂແມ່ນສອດຄ່ອງກັບກົດລະບຽບຄວາມໄວຂອງມໍເຕີ AVI ແຮງດັນປະມານ 0.02V.。



ຂັ້ນຕອນການຕິດຕັ້ງຜະລິດຕະພັນ
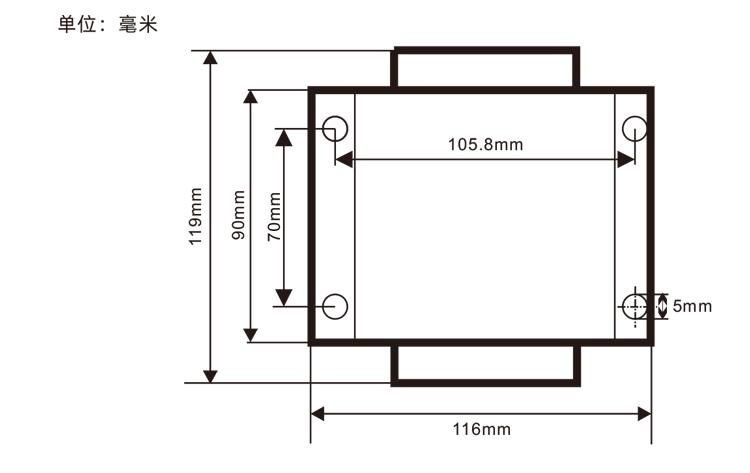
1.ຕິດຕັ້ງຜູ້ຮັບໃນຕູ້ເອກະພາບໂດຍຜ່ານການ snap-on ຢູ່ດ້ານຫຼັງ,ຫຼືຕິດຕັ້ງມັນຢູ່ໃນຕູ້ໄຟຟ້າຜ່ານຮູສະກູຢູ່ສີ່ແຈຂອງເຄື່ອງຮັບ。
2.ອ້າງເຖິງແຜນວາດສາຍໄຟຂອງພວກເຮົາ,ປຽບທຽບອຸປະກອນໃນສະຖານທີ່ຂອງທ່ານ,ເຊື່ອມຕໍ່ອຸປະກອນກັບເຄື່ອງຮັບຜ່ານສາຍ。
3.ຫຼັງຈາກຜູ້ຮັບໄດ້ຖືກແກ້ໄຂແລ້ວ,ເສົາອາກາດທີ່ມີໃຫ້ກັບຜູ້ຮັບຕ້ອງໄດ້ເຊື່ອມຕໍ່,ແລະຕິດຕັ້ງຫຼືວາງປາຍສາຍອາກາດພາຍນອກຕູ້ໄຟຟ້າ,ມັນໄດ້ຖືກແນະນໍາໃຫ້ວາງສັນຍານຢູ່ດ້ານເທິງຂອງຕູ້ໄຟຟ້າ.,ມັນບໍ່ໄດ້ຖືກອະນຸຍາດໃຫ້ຕັດສາຍອາກາດ,ຫຼືວາງເສົາອາກາດພາຍໃນຕູ້ໄຟຟ້າ,ອັນນີ້ອາດສົ່ງຜົນໃຫ້ສັນຍານບໍ່ດີ ແລະໃຊ້ບໍ່ໄດ້。
4.ສຸດທ້າຍ, ຕິດຕັ້ງຫມໍ້ໄຟໃນການຄວບຄຸມໄລຍະໄກ,ບີບຝາແບັດໃຫ້ແໜ້ນ,ຈາກນັ້ນເປີດສະວິດໄຟຄວບຄຸມໄລຍະໄກ,ຈໍສະແດງຜົນການຄວບຄຸມໄລຍະໄກຈະສະແດງການໂຕ້ຕອບການເຮັດວຽກປົກກະຕິ.,ທ່ານສາມາດປະຕິບັດການຄວບຄຸມໄລຍະໄກ。
ຂະຫນາດຕິດຕັ້ງຮັບ
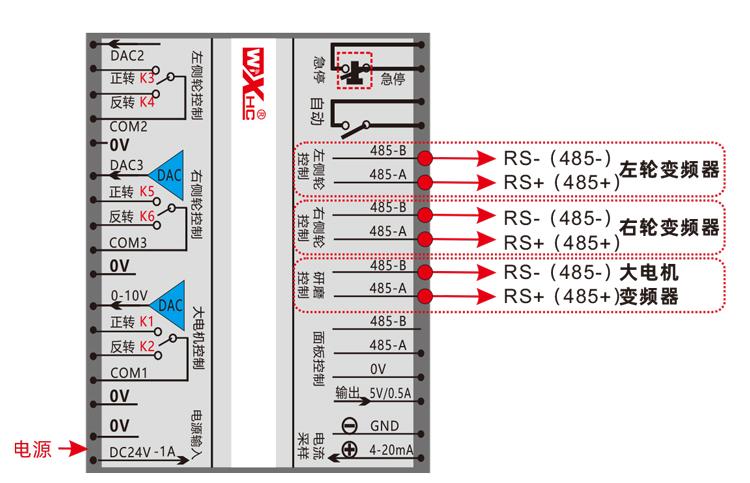
ແຜນວາດສາຍໄຟສາຍ

ການຕັ້ງຄ່າພາລາມິເຕີການຄວບຄຸມໄລຍະໄກ
ໃສ່ວິທີການພາລາມິເຕີພື້ນຫຼັງການຄວບຄຸມໄລຍະໄກ:ຍ້າຍສະຫຼັບຮູບແບບໄປເປັນຮູບແບບຄູ່ມື,ປັບຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍເປັນ 25, ຫຼື 0、10、20、40、50,ດຶງສະວິດການຫມຸນໄປຂ້າງຫນ້າຂອງມໍເຕີຂະຫນາດໃຫຍ່ຂຶ້ນເທິງ 3 ເທື່ອຕິດຕໍ່ກັນ,ດຶງລົງ 3 ເທື່ອຕິດຕໍ່ກັນ;
ໃຊ້ປຸ່ມ "ການປັບຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ" ເພື່ອຫັນຫນ້າ,ຫຼັງຈາກການກົດເປີດໃຊ້ງານ, ເຮັດໃຫ້ປຸ່ມຄວບຄຸມຄວາມໄວມໍເຕີຂະຫນາດນ້ອຍເພື່ອປັບປຸງແກ້ໄຂຕົວກໍານົດການ.; ຫຼັງຈາກການດັດແກ້,ຫັນຫນ້າໄປຫາທ້າຍ,ເລືອກ Save ແລະ Exit,ກົດປຸ່ມເປີດໃຊ້ງານເພື່ອອອກຈາກເມນູ;
ຕົວກໍານົດການແມ່ນດັ່ງຕໍ່ໄປນີ້: ປະຈຸບັນສູງສຸດ:ຊ່ວງຄ່າຕິຊົມປັດຈຸບັນຂອງມໍເຕີຂະຫນາດໃຫຍ່,ຊ່ວງການຕັ້ງຄ່າ 15-200A,ຄ່າເລີ່ມຕົ້ນ 60;
ຕົວກໍານົດການຄວບຄຸມຄວາມໄວ:ຮູບແບບອັດຕະໂນມັດ motor ຂະຫນາດນ້ອຍອັດຕະໂນມັດເລັ່ງຄວາມໄວ,ຂະຫນາດນ້ອຍກວ່າ, ໄວກວ່າ,ຂອບເຂດການຕັ້ງຄ່າ 200-1500, ຄ່າເລີ່ມຕົ້ນ 1000;
ຕົວກໍານົດການຊັກຊ້າ:ກໍານົດຂອບເຂດຈໍາກັດເທິງສໍາລັບການປ່ຽນແປງຄວາມໄວມໍເຕີທີ່ອະນຸຍາດໃຫ້,ເມື່ອການປ່ຽນແປງໃນປະຈຸບັນເກີນຄ່ານີ້,ຈະຊ້າລົງ。 ຂະຫນາດນ້ອຍກວ່າ,ມໍເຕີຊ້າຍແລະຂວາຊ້າລົງໄວ,ຊ່ວງ 05-12,ຄ່າເລີ່ມຕົ້ນ 06;
ເລີ່ມການລັອກດ້ວຍຕົນເອງ: ຄວາມເລັ່ງ a1:ມໍເຕີຂະຫນາດໃຫຍ່, ຄວາມໄວເພີ່ມຂຶ້ນໄວ.,ຊ່ວງ 00-06,ຄ່າເລີ່ມຕົ້ນ 01;
ການຊ້າລົງ a2:ຄວາມໄວຂອງມໍເຕີໃຫຍ່ກວ່າ, ມັນຈະຫຼຸດລົງໄວ.,ຊ່ວງ 00-06,ຄ່າເລີ່ມຕົ້ນ 02;
ເປີດໃຊ້ການປັບຄວາມໄວ:ມັນຈໍາເປັນຕ້ອງກົດ Enable ເພື່ອປັບຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍບໍ?,00ປິດໃຊ້ງານ,01ເປີດໃຊ້,ຄ່າເລີ່ມຕົ້ນ 01;
ມໍເຕີຂະຫນາດໃຫຍ່ຈະຮັກສາການລັອກດ້ວຍຕົນເອງໂດຍອັດຕະໂນມັດຫຼັງຈາກເປີດແລະເປີດສະຫຼັບປີ້ນ?,00ບໍ່ຮັກສາ,01ຮັກສາ,ຄ່າເລີ່ມຕົ້ນ 01;
ຍ່າງສູງສຸດ:ຄວາມໄວສູງສຸດຂອງມໍເຕີຊ້າຍແລະຂວາ,ຊ່ວງ 10-100,ຄ່າເລີ່ມຕົ້ນ 50;
ຕັດກະແສໄຟຟ້າ:ກະແສຕັດສູງສຸດ,ຫນ້າຈໍສະແດງຄ່າ IC,ຊ່ວງ 15-160,ຄ່າເລີ່ມຕົ້ນ 30,ຈໍສະແດງຜົນ IC ທີ່ສອດຄ້ອງກັນ:30。ຂອບເຂດຈໍາກັດເທິງຂອງພາລາມິເຕີນີ້ = ສູງສຸດໃນປະຈຸບັນ x80%;
ຂີດຈຳກັດຄວາມໄວເລີ່ມຕົ້ນ:ຄວາມໄວຕັດອັດຕະໂນມັດຂອງມໍເຕີຂະຫນາດນ້ອຍໃນຕອນເລີ່ມຕົ້ນ,ຊ່ວງ 00-100,ຄ່າເລີ່ມຕົ້ນ 10,ຫນ້າຈໍຄວນຈະສະແດງ F1.0,ພາລາມິເຕີນີ້ແມ່ນຖືກຕ້ອງພຽງແຕ່ເມື່ອການຍ່າງສູງສຸດຖືກຕັ້ງເປັນ 50。
ຊ່ອງໄຮ້ສາຍ:ຄ່າເລີ່ມຕົ້ນ 10,ເມື່ອສັນຍານຄວບຄຸມໄລຍະໄກບໍ່ສະຖຽນ,ຫຼືເມື່ອມີສັນຍານລົບກວນຢູ່ໃນເວັບໄຊ,ຕົວກໍານົດການນີ້ສາມາດແກ້ໄຂໄດ້,ສະຫຼັບຊ່ອງ,ຫຼີກເວັ້ນການລົບກວນ;
ຈຳກັດຄວາມໄວຊົດເຊີຍ:ເຄື່ອງຈັກຂະຫນາດນ້ອຍອັດຕະໂນມັດຄວາມໄວຕັດເທິງຂອບເຂດຈໍາກັດ,ຊ່ວງ 00-200,ຄ່າເລີ່ມຕົ້ນ 60,ຫນ້າຈໍກົງກັບການສະແດງ 6.0;ສະແດງຄ່າເທິງ limit = speed limit offset × 0.1;
ເຈົ້າພາບທີ່ໃຫຍ່ທີ່ສຸດ:ຄວາມໄວສູງສຸດຂອງມໍເຕີຂະຫນາດໃຫຍ່,ຊ່ວງ 10-100,ຄ່າເລີ່ມຕົ້ນ 50;
ອຸປະກອນ mbus (ຕ້ອງການ):ການຄັດເລືອກຕົວແບບ inverter motor ຂະຫນາດໃຫຍ່,ຊ່ວງ 00-03,ຄ່າເລີ່ມຕົ້ນ 03;
00-Shanghai Xielin 01-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
ອຸປະກອນ sbus (ຕ້ອງການ):ການຄັດເລືອກຕົວແບບ inverter motor ຂະຫນາດນ້ອຍ,ຊ່ວງ 00-05,ຄ່າເລີ່ມຕົ້ນ 03;
00-Shanghai Xielin 01-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
04-Yasukawa Tatsu 05-ບໍ່ມີ
ການຕັ້ງຄ່າຕົວກໍານົດການແປງຄວາມຖີ່
1.ການເລືອກແຫຼ່ງຄໍາສັ່ງ:ຊ່ອງທາງຄໍາສັ່ງການສື່ສານ
2.ການເລືອກແຫຼ່ງຄວາມຖີ່ຫຼັກ:ການສື່ສານໃຫ້
3.ອັດຕາ baud:19200
4.ຮູບແບບຂໍ້ມູນ:ບໍ່ມີ checksum,ຮູບແບບຂໍ້ມູນ<8-N-1>
5.ທີ່ຢູ່ທ້ອງຖິ່ນ:ຕົວປ່ຽນຄວາມຖີ່ຊ້າຍແມ່ນຕັ້ງເປັນ 1,ຕົວປ່ຽນຄວາມຖີ່ທີ່ຖືກຕ້ອງແມ່ນຕັ້ງເປັນ 2,inverter ມໍເຕີຂະຫນາດໃຫຍ່ຖືກຕັ້ງເປັນ 3
ຄໍາແນະນໍາການດໍາເນີນງານການຄວບຄຸມໄລຍະໄກ
1.ເຄື່ອງໄດ້ຖືກຂັບເຄື່ອນ,ເປີດເຄື່ອງຄວບຄຸມໄລຍະໄກ,ໃສ່ພື້ນຫຼັງການຄວບຄຸມໄລຍະໄກ,ກໍານົດພາລາມິເຕີພື້ນຫລັງຂອງການຄວບຄຸມໄລຍະໄກ,ສິ່ງທີ່ ສຳ ຄັນແມ່ນການຕັ້ງຕົວແບບ inverter ຂອງມໍເຕີນ້ອຍແລະມໍເຕີໃຫຍ່ (ຂ້າມຂັ້ນຕອນນີ້ຖ້າຜູ້ຜະລິດເຄື່ອງຈັກໄດ້ຕັ້ງມັນ);
2.ກໍານົດຕົວກໍານົດການ inverter (ຂ້າມຂັ້ນຕອນນີ້ຖ້າຫາກວ່າຜູ້ຜະລິດເຄື່ອງຈັກໄດ້ກໍານົດໃຫ້ເຂົາເຈົ້າ);
3.ສະຫຼັບການຄວບຄຸມໄລຍະໄກເປັນໂໝດຄູ່ມື,ຫຼັງຈາກນັ້ນ, ໃຊ້ການຄວບຄຸມຫ່າງໄກສອກຫຼີກເພື່ອຍ້າຍເຄື່ອງໄປຕໍາແຫນ່ງເຮັດວຽກ;
4.ໃນຮູບແບບຄູ່ມື,ຕັ້ງຄ່າ IC ຄ່າການຕັ້ງຄ່າປະຈຸບັນຕັດມໍເຕີຂະຫນາດໃຫຍ່,ກໍານົດຄວາມໄວມໍເຕີສູງສຸດ;
5.ສະຫຼັບໄປໂໝດອັດຕະໂນມັດ,ກໍານົດຂອບເຂດຄວາມໄວການຕັດມໍເຕີຂະຫນາດນ້ອຍຄ່າ F;
6.ໃນຮູບແບບອັດຕະໂນມັດ,ຫັນສະວິດມໍເຕີໃຫຍ່ເພື່ອສົ່ງຕໍ່ເພື່ອເລີ່ມຕົ້ນມໍເຕີໃຫຍ່,ຫຼັງຈາກນັ້ນ, ຫັນສະຫຼັບມໍເຕີຂະຫນາດນ້ອຍເພື່ອໄປຂ້າງຫນ້າຫຼືເກຍປີ້ນ,ການຄວບຄຸມໄລຍະໄກເຂົ້າສູ່ຮູບແບບການຕັດອັດຕະໂນມັດ,ເລີ່ມຕັດ。


1.ກະລຸນາຢູ່ທີ່ອຸນຫະພູມຫ້ອງແລະຄວາມກົດດັນ,ໃຊ້ໃນສະພາບແວດລ້ອມທີ່ແຫ້ງແລ້ງ,ຂະຫຍາຍຊີວິດການບໍລິການ。
2.ກະລຸນາຫຼີກລ່ຽງການປຽກຊຸ່ມໃນລະດູຝົນ、ໃຊ້ໃນສະພາບແວດລ້ອມທີ່ຜິດປົກກະຕິເຊັ່ນ: ຕຸ່ມໂພງ,ຂະຫຍາຍຊີວິດການບໍລິການ。
3.ກະລຸນາຮັກສາຊ່ອງຫມໍ້ໄຟແລະພື້ນທີ່ shrapnel ໂລຫະທໍາຄວາມສະອາດ。
4.ກະລຸນາຫຼີກລ້ຽງການບີບ ແລະວາງເຄື່ອງຄວບຄຸມໄລຍະໄກ, ເຊິ່ງອາດຈະເຮັດໃຫ້ເກີດຄວາມເສຍຫາຍ.。
5.ບໍ່ໃຊ້ເປັນເວລາດົນນານ,ກະລຸນາຖອດແບັດເຕີຣີອອກ,ແລະເກັບຮັກສາການຄວບຄຸມໄລຍະໄກແລະຫມໍ້ໄຟໃນບ່ອນທີ່ສະອາດແລະປອດໄພ。
6.ຈ່າຍເອົາໃຈໃສ່ກັບຄວາມຊຸ່ມ - ຫຼັກຖານສະແດງແລະການພິສູດຊ shock ອກໃນລະຫວ່າງການເກັບຮັກສາແລະການຂົນສົ່ງ。

1.ກະລຸນາອ່ານຄໍາແນະນໍາສໍາລັບໃຊ້ໃນລາຍລະອຽດກ່ອນການນໍາໃຊ້,ບຸກຄະລາກອນທີ່ບໍ່ແມ່ນມືອາຊີບແມ່ນຖືກຫ້າມ。
2.ກະລຸນາປ່ຽນຫມໍ້ໄຟໃນເວລາທີ່ແບັດເຕີຣີຕໍ່າເກີນໄປ,ຫຼີກເວັ້ນການຜິດພາດທີ່ເກີດຈາກພະລັງງານຫມໍ້ໄຟບໍ່ພຽງພໍເຮັດໃຫ້ການຄວບຄຸມໄລຍະໄກບໍ່ສາມາດເຮັດວຽກໄດ້.。
3.ຖ້າຕ້ອງການສ້ອມແປງ,ກະລຸນາຕິດຕໍ່ຜູ້ຜະລິດ,ຖ້າຄວາມເສຍຫາຍທີ່ເກີດຈາກການສ້ອມແປງຕົນເອງ,ຜູ້ຜະລິດຈະບໍ່ໃຫ້ການຮັບປະກັນ。
(ຂໍ້ສັງເກດ:ການຍົກລະດັບຜະລິດຕະພັນຫຼືສະຖານະການຍົກລະດັບ,ເມື່ອຊື້ຜະລິດຕະພັນ, ກະລຸນາຕິດຕໍ່ກັບພະນັກງານຂາຍສໍາລັບສະຖານະການຜະລິດຕະພັນຫລ້າສຸດ)





