

地坪研磨机无线工业遥控器
地坪研磨机无线遥控器 DH22ST-Le
Description
![]()

型号:DH22ST-Le
适配设备:地坪研磨机

备注:三种天线可以三选一,默认标配吸盘天线

急停:急停按钮被拍下,请释放急停按钮
低压:遥控器电池电量过低,请更换电池

掉网:无线信号中断,请检查接收器电源,重新上电,遥控器重新开机
![]()
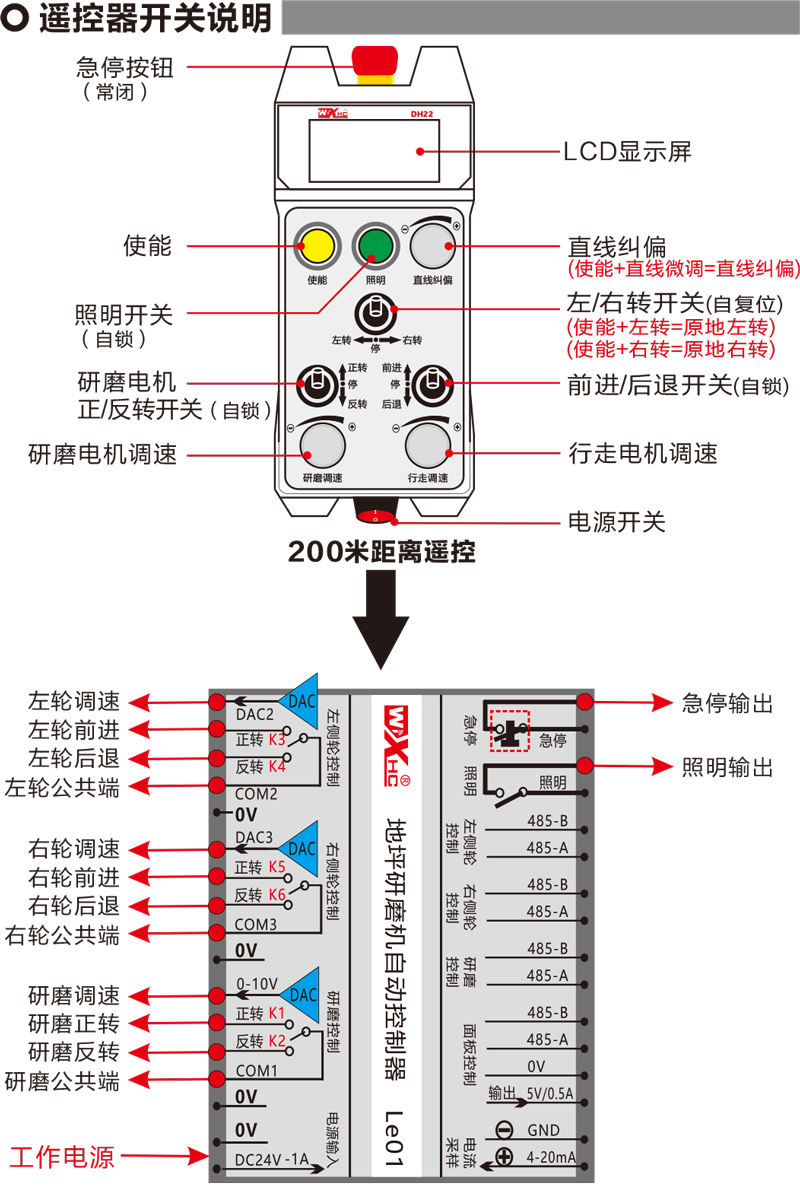
1、遥控器开机
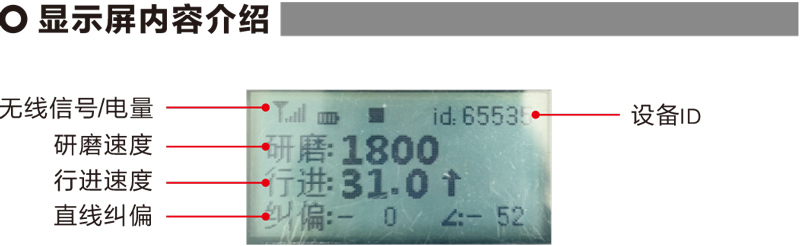
接收器通电,接收器上RF-LED灯开始闪烁;遥控器安装两节5号电池,打开电源开关,显示屏显示电机速度,表示开机成功。
2、照明
按一下“照明”按钮,接收器照明输出打开,显示屏出现照明图标![]() ;
;
再次按一下“照明”按钮,接收器照明输出关闭,显示屏照片图标消失。
3、研磨电机和调速
将“正转/反转”开关扳到正转,接收器研磨正转打开,显示屏显示正转 ;
;
将“正转/反转”开关扳到反转,接收器研磨反转打开,显示屏显示反转 ;
;
将“正转/反转”开关扳到反转,接收器研磨反转打开,显示屏显示反转
旋转“研磨调速”旋钮,可以调节接收器研磨调速输出电压大小0-10V;
4、行走电机和调速
将“前进/后退”开关扳到前进,接收器左轮前进和右轮前进打开,显示屏显示前进 ;
;
将“前进/后退”开关扳到后退,接收器左轮后退和右轮后退打开,显示屏显示后退 ![]() ;
;
旋转“行走调速”旋钮,可以调节接收器左轮和右轮调速输出电压大小0-10V;
5、左转和右转
将“左转/右转”开关扳到左转,接收器右轮前进打开,显示屏显示左转  ;
;
将“左转/右转”开关扳到右转,接收器左轮前进打开,显示屏显示右转 ;
;
;6、原地转弯
原地左转:按住“使能”按钮,将“左转/右转”开关扳到左转位置,接收器左轮后退和右轮前进打开,开始原地左转;
原地右转:按住“使能”按钮,将“左转/右转”开关扳到右转位置,接收器左轮前进和右轮后退打开,开始原地右转;
7、急停
拍下急停按钮,接收器急停输出断开;所有开关控制断开,所有速度清零;
8、直线纠偏
当左右行走电机在前进和后退中,出现左右速度不一致,直线行走发生偏移,可以使用遥控器的直线纠偏功能,对左右轮速度进行微调;
纠偏原理:通过纠偏功能,微调左轮速度,来达到和右轮一致的速度,实现左右轮速度同步,消除偏移;
纠偏操作方法:按住“使能”按钮,缓慢旋转“直线纠偏”旋钮;
顺时针旋转,调高左轮速度电压,显示屏纠偏值增大;
逆时针旋转,降低左轮速度电压,显示屏纠偏值减小;
纠偏范围:纠偏值-90到90;1个纠偏单位的纠偏电压大约0.04V;
9、参数菜单(用户禁止私自修改)
进入参数菜单方式:研磨为0时,正转/反转连续上掰3次,再下掰3次;
退出方式:选择保存或者不保存,按使能按钮确认;
直线微调范围:0-120;
研磨速度:0-3000;
行走速度:0-1000;
![]()
| 接收器工作电源 |
DC24V/1A(独立电源供电)
|
| 接收器输出点负载 | AC0-250V/3A DC0-30V/5A |
| 接收器调速输出电压 | DC0-10V |
本产品最终解释权归成都芯合成科技有限公司所有。




-500x650.png)
